
-

生物通官微
陪你抓住生命科技
跳动的脉搏
生物通官微
陪你抓住生命科技
跳动的脉搏
我国学者在智能软材料系统研究方面取得进展
【字体: 大 中 小 】 时间:2024年04月02日 来源:国家自然科学基金委员会
编辑推荐:
相关研究成果以“基于光热响应水凝胶趋光载具的水下趋光性运动(Self-regulated underwater phototaxis of photoresponsive hydrogel-based phototactic vehicle)”为题,于2023年8月21日发表在《自然?纳米技术》(Nature Nanotechnology)杂志上
| |
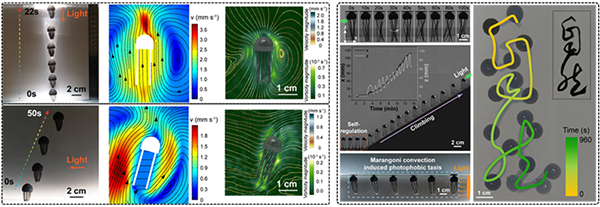 |
图 软材料系统的自主向光、趋光性
在国家自然科学基金项目(批准号:52076127)等资助下,上海交通大学钱小石教授团队与香港大学方绚莱教授合作在智能软材料系统研究方面取得进展。开发了一种整体的、刺激响应的趋光软体载具(PTV),它具有类似水母的对称性几何结构,能够迅速地朝向任意方向的稳定光源自主运动,并根据光源方向的变化,自主实时准确追踪。相关研究成果以“基于光热响应水凝胶趋光载具的水下趋光性运动(Self-regulated underwater phototaxis of photoresponsive hydrogel-based phototactic vehicle)”为题,于2023年8月21日发表在《自然?纳米技术》(Nature Nanotechnology)杂志上。论文链接:https://www.nature.com/articles/s41565-023-01490-4。
生命体依靠刺激反应反馈回路进行自我调节运动,以获取食物和繁殖机会,并以适应性方式远离危险。这些调节运动被称为趋光性、趋旋性、趋流性和趋化性等,它们允许生物体对环境刺激做出决策,并沿着偏好的方向移动。然而,人工系统的控制仍然依赖于预先编程的电子电路控制和人的遥控操作,如磁场操纵、激光的闪烁频率以及空间中的边界限制。如不依赖电子控制或人工干预,仅仅利用均一软材料,人们依然难以实现无拖线、自决策的全空间趋光性运动。
为了突破以上限制,研究团队通过调整高分子水凝胶纳米复合材料内部的光-热-机械-流体相互作用,成功地在简单的均质材料中实现了人工趋光性运动。这种趋光性不依赖于对光源或特殊的边界条件要求。在自然光线的持续照射下,这种软体机器人能够通过自主对流散热来建立负反馈回路以实现对行动方向偏移的自主校准,形式上具有了简单的自主决策的智能,能够在无需外置电子电路设备或人工遥控的情况下,自主、实时、准确地跟踪位置不停变化的辐照源。考虑到这种新型的智能软材料系统仅具有一个负反馈回路,未来如能集成更多控制回路,这种简单的材料系统设计方法有望实现更多、更智能的自主控制功能。

