
-

生物通官微
陪你抓住生命科技
跳动的脉搏
生物通官微
陪你抓住生命科技
跳动的脉搏
未来技术学院韩梦迪课题组合作研发亚毫米尺度的遥控步行机器人
【字体: 大 中 小 】 时间:2022年06月26日 来源:北京大学新闻网
编辑推荐:
2022年5月25日,北京大学未来技术生物医学工程系韩梦迪课题组与美国西北大学John A. Rogers教授、黄永刚教授,以及清华大学张一慧教授组成国际合作团队,在Science Robotics杂志发表了题为“Submillimeter-scale multimaterial terrestrial robots”的论文。
2022年5月25日,北京大学未来技术生物医学工程系韩梦迪研究员课题组与美国西北大学John A. Rogers教授、黄永刚教授,以及清华大学张一慧教授组成国际合作团队,在Science Robotics杂志发表了题为“Submillimeter-scale multimaterial terrestrial robots”的论文。
![]()
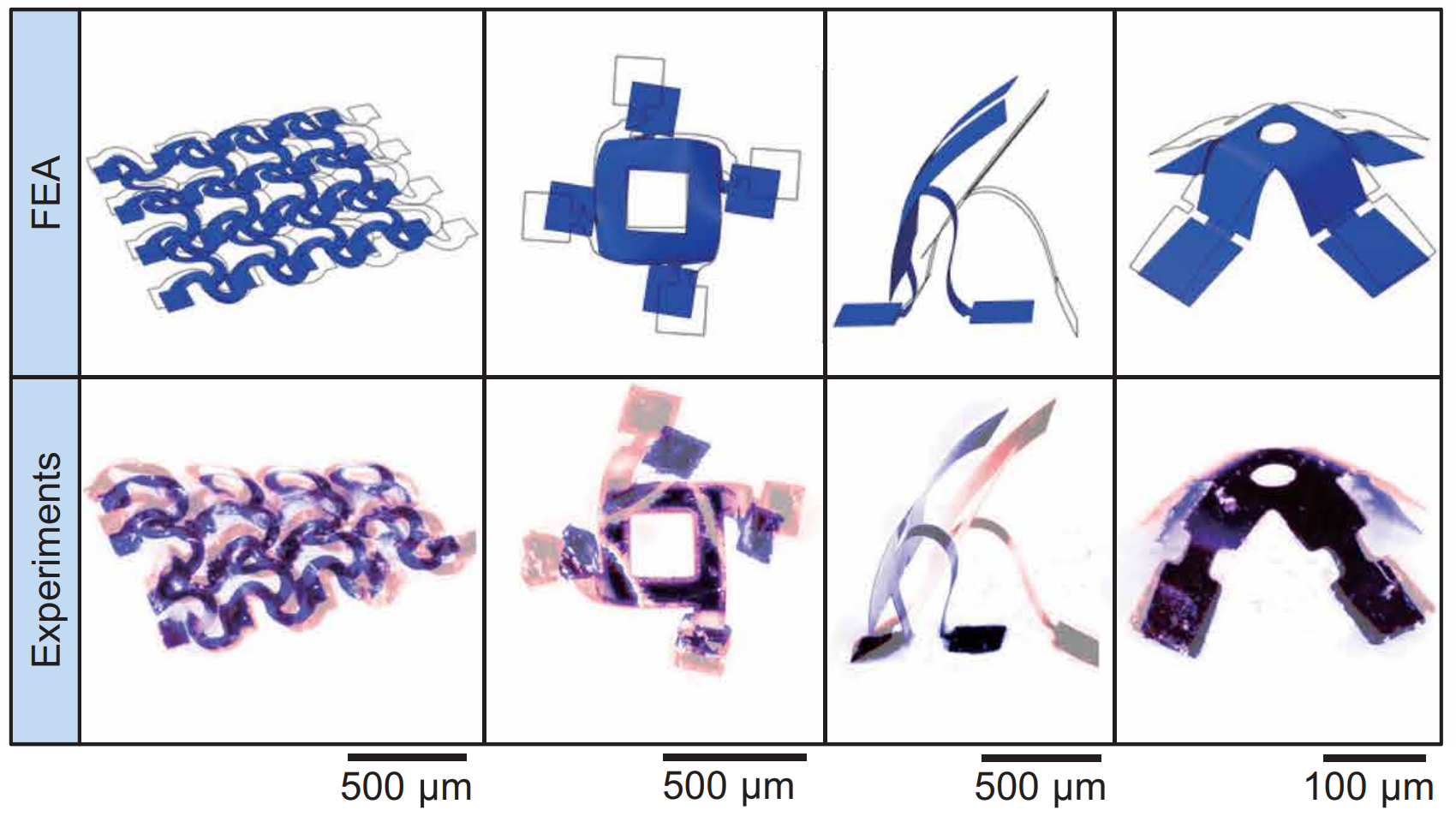
微型机器人在微纳米制造与组装、微创外科手术、细胞与组织操控等领域具有广泛的应用前景。但是,目前的微型机器人大部分仅能在液体环境中运动,很难在固体表面通过远程控制来实现多方向、多模态的运动。为了解决这一问题,韩梦迪课题组联合国内外多家研究团队,共同研发了一款亚毫米尺度、多材料集成、具有复杂三维形貌和运动模式的微型机器人,是世界上最小的遥控步行机器人。这种机器人宽度只有半毫米,可以具有类似螃蟹、蜘蛛、尺蠖、蟋蟀、甲虫等动物的三维仿生形貌。
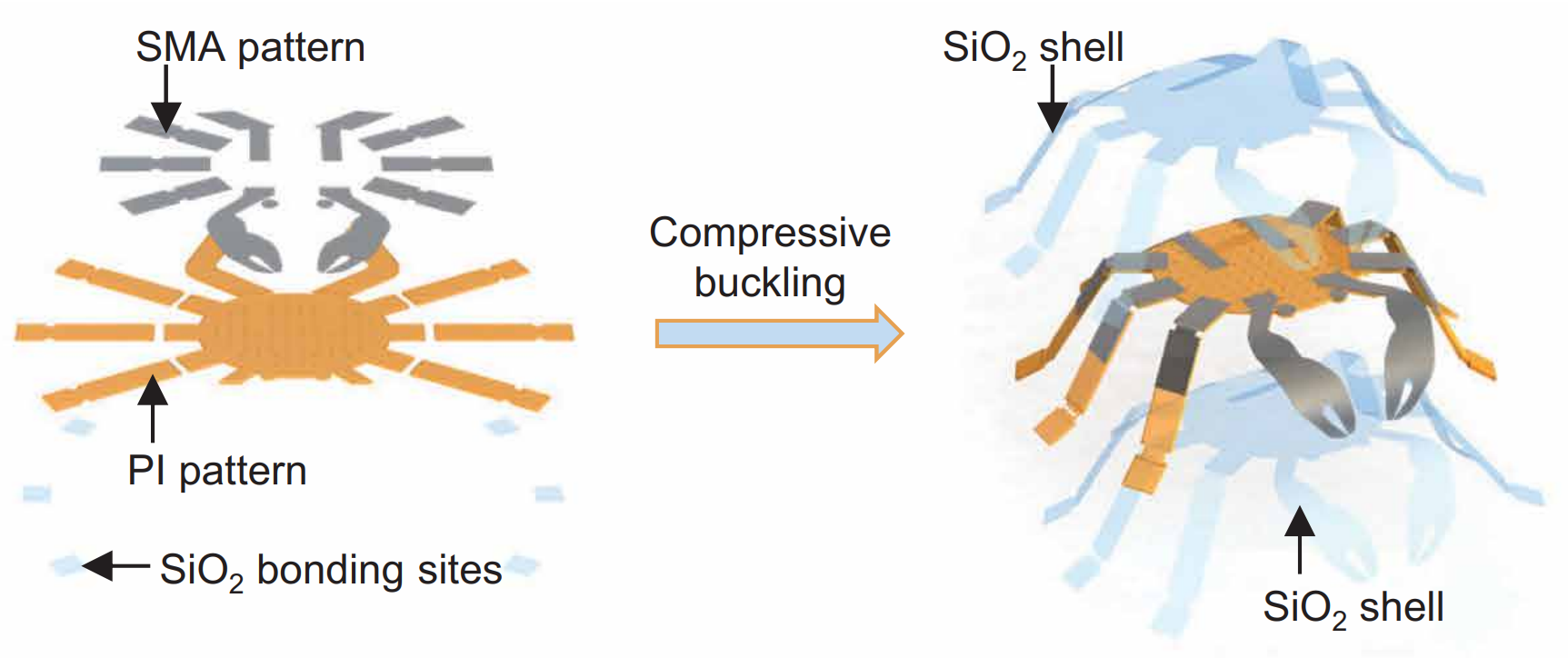
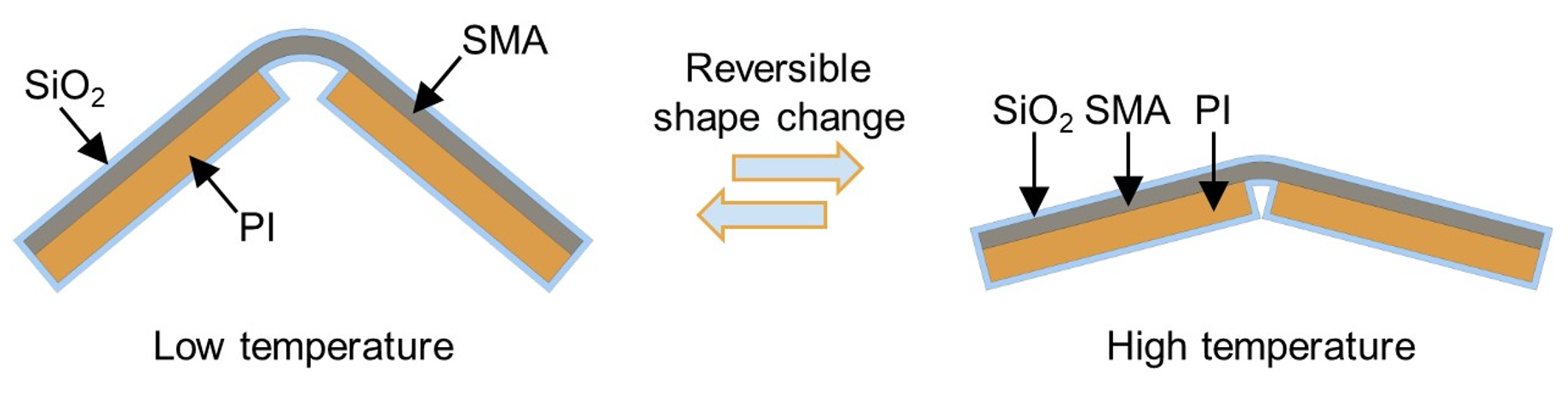
这种具有复杂三维形貌的微型机器人可以通过并行化的方法制备。首先,通过光刻、刻蚀、薄膜沉积等常规半导体工艺制备平面的机器人图形;之后通过转印和三维屈曲方法将多个平面图形同时转变为三维构型。与传统的机器人不同,这些三维微型机器人不需要复杂的电力或液/气压进行驱动,而是通过远程的激光进行控制的。机器人由聚酰亚胺、形状记忆合金和二氧化硅外壳组成。当激光照射在机器人表面时,会产生局部的温度升高,导致形状记忆合金发生相变,从三维形状转变为初始的平面形状,并带动聚酰亚胺产生形变与位移。当激光移除时,机器人表面温度降低,二氧化硅外壳的弹性回复力会将形状记忆合金重新回弹成三维形状。周期性地用激光加热和冷却机器人的不同部位,则可以实现方向可控的运动。由于这种机器人的体积非常小,降温速率非常快,在一秒内可以往复升降温十余次,从而产生每秒半个身长的定向运动。
通过改变机器人的结构设计和激光加热不同区域的时序,可以实现十分丰富的运动模式,包括弯曲、扭曲、爬行、行走、转弯、跳跃等。例如,当激光从右向左扫描时,会依次加热机器人的右、中、左部分,导致机器人重心向右或向左偏移,从而在左右两侧产生不同的支持力。两侧支持力的差异是机器人实现定向运动的基础,使机器人在激光从右向左扫描时呈现自左向右的定向运动;当激光从左向右扫描时,机器人会沿着相反的方向运动。
如果将角锥棱镜和半透明变色材料集成在这些机器人上,则可以实现额外的定位与遥测功能。其中,角锥棱镜具有独特的几何形状,能够将任意角度的光线沿着入射方向返射。因此,可以在激光旁边放置一个光电探测器,用于检测反射光的强度。当机器人的周围环境发生变化时,半透明变色材料的颜色也会随之发生变化,从而改变光电探测器的输出信号强度。通过设计制备针对湿度、酸碱度、紫外辐照强度的变色材料,则可以基于微型机器人实现这些物理、化学量的远程测量。
这些研究结果为狭窄空间的复杂操控提供了可能性,未来有望应用于工业生产,实现对微小零部件的组装和修复;或应用于微创手术中,实现清除阻塞、阻止出血、消除肿瘤、定向给药等功能。
上述研究工作得到了国家自然科学基金等项目的支持,韩梦迪、北京理工大学郭晓岗副教授以及北京大学微电子研究院2015级博士毕业生陈学先为本论文的第一作者,John A. Rogers和黄永刚以及张一慧为本论文的通讯作者。微型机器人运动的相关视频可参见韩梦迪课题组网站(http://www.hmd-lab.com/microrobot)。

