
-

生物通官微
陪你抓住生命科技
跳动的脉搏
生物通官微
陪你抓住生命科技
跳动的脉搏
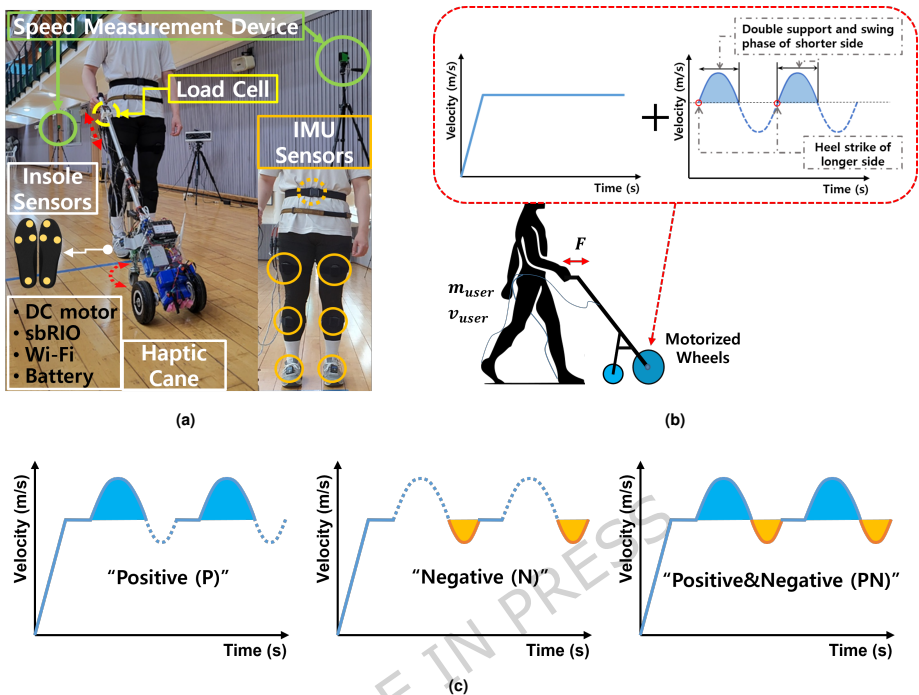
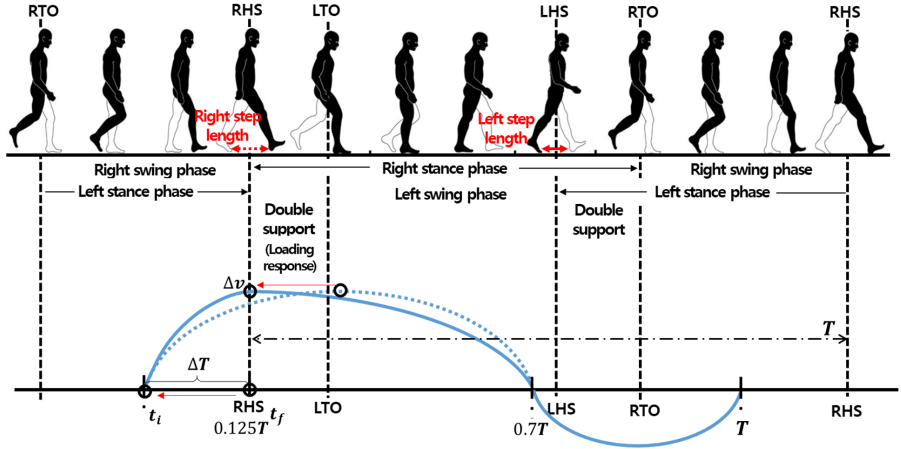
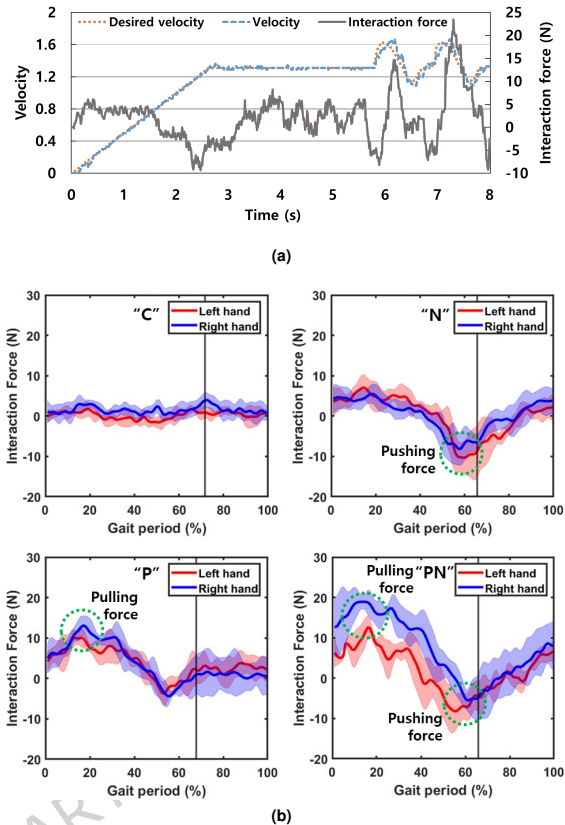
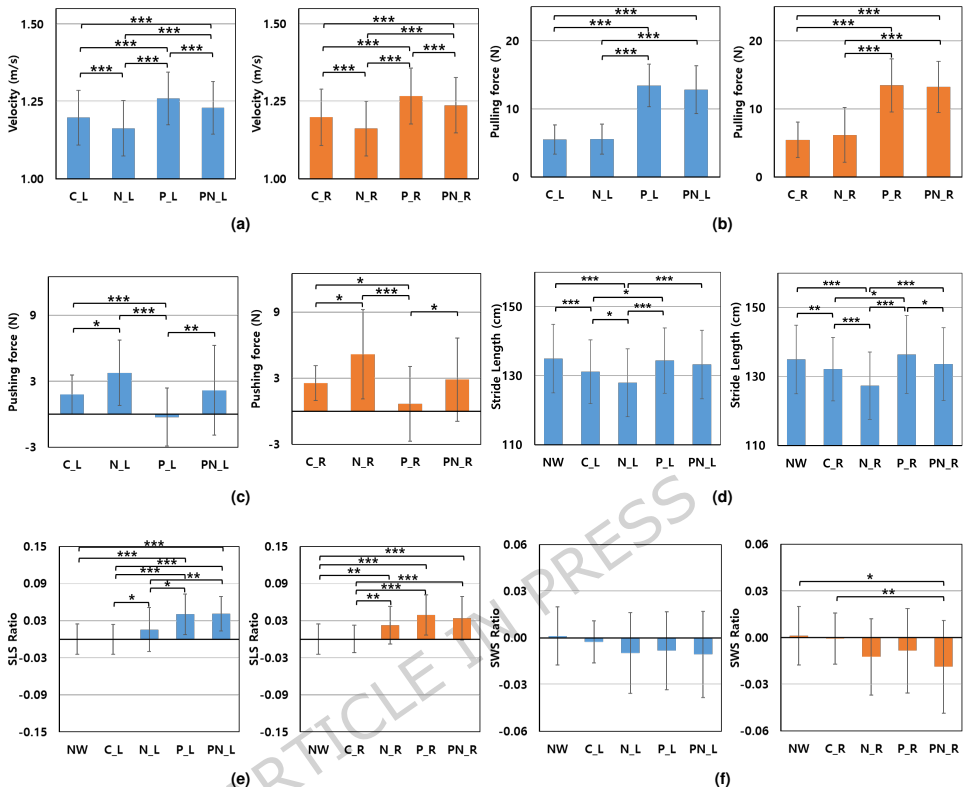
一种新型机器人手杖速度调控方案:改善步长对称性的地面行走康复新策略
《Scientific Reports》:A novel scheme for speed variation of a robotic cane to improve step length symmetry during overground walking
【字体: 大 中 小 】 时间:2025年12月13日 来源:Scientific Reports 3.9
编辑推荐:
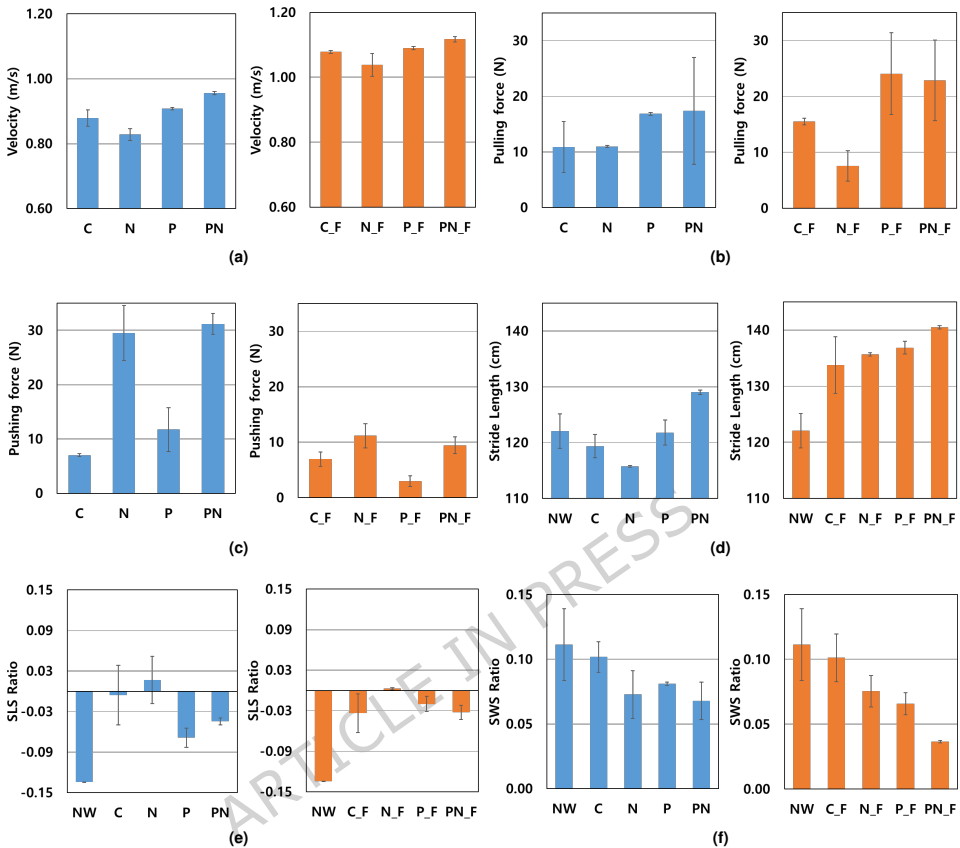
为解决脑卒中患者步长不对称(Step Length Symmetry, SLS)这一康复难题,研究人员开发了一种基于机器人触觉手杖(Haptic Cane, HC)的速度变异方法(Speed Variation Method, SVM),通过正弦波速度曲线生成间歇性拉力/推力。研究发现,在24名健康受试者和1名卒中患者的实验中,正相(P)和正负相组合(PN) SVM能显著改善SLS比值(健康受试者从0.00±0.02提升至0.04±0.03,卒中患者从-0.13±0.00改善至-0.04±0.01),同时维持骨盆倾斜RMS值(p<0.001),表明该方案可在不影响行走平衡的前提下提升步态对称性。
 生物通微信公众号
生物通微信公众号
知名企业招聘

