
-

生物通官微
陪你抓住生命科技
跳动的脉搏
生物通官微
陪你抓住生命科技
跳动的脉搏
基于几何一致性的非共视区域LiDAR标定算法研究
《IEEE Access》:Research on LiDAR Calibration Algorithm for Non-Common-View Areas
【字体: 大 中 小 】 时间:2025年12月16日 来源:IEEE Access 3.6
编辑推荐:
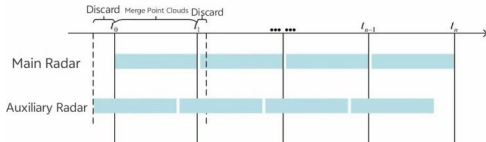
为解决自动驾驶系统中双激光雷达因安装限制导致视场无重叠、传统标定方法失效的难题,研究人员开展了基于几何一致性先验的非共视区域LiDAR自标定算法研究。该研究通过差分约束时间同步模块对齐点云,采用去噪下采样提升效率,并创新性地利用主LiDAR构建全局地图,通过广义迭代最近点(GICP)优化实现从LiDAR数据的迭代配准。实验表明,该算法在无共视区域场景下最大平移误差仅0.064m,旋转误差为1.243°,为复杂环境下多LiDAR融合提供了实用、低成本的解决方案。







 生物通微信公众号
生物通微信公众号
知名企业招聘

