
-

生物通官微
陪你抓住生命科技
跳动的脉搏
生物通官微
陪你抓住生命科技
跳动的脉搏
基于EEG的脑机接口实现个体手指水平实时机器人手控制的突破性研究
【字体: 大 中 小 】 时间:2025年07月01日 来源:Nature Communications 14.7
编辑推荐:
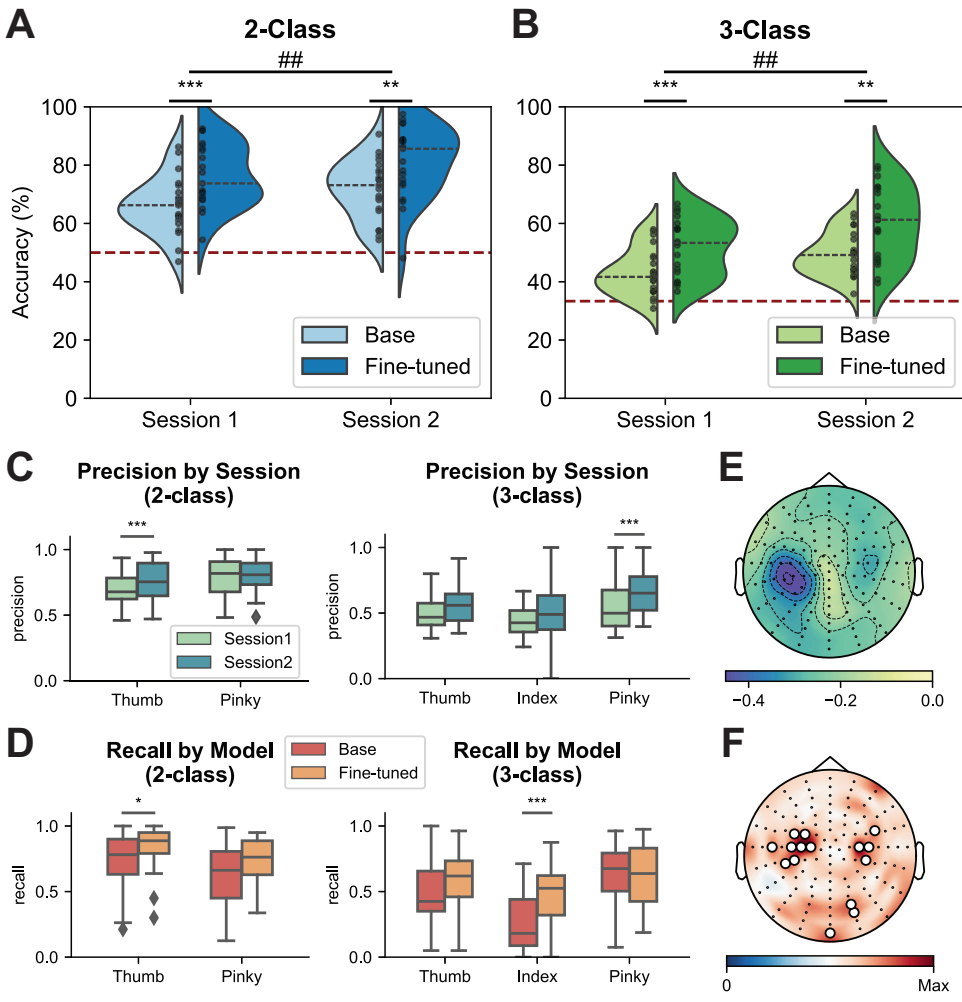
本研究针对非侵入式脑机接口(BCI)在精细运动控制中的局限性,开发了基于运动执行(ME)和运动想象(MI)的深度学习解码系统。通过21名受试者实验,实现了拇指-小指双指任务80.56%和三指任务60.61%的实时解码准确率,首次证明非侵入式EEG-BCI可实现个体手指水平的机器人控制,为运动障碍患者精细功能重建提供了新方案。
人类双手的精细运动能力是区别于其他生物的重要特征,然而中风、脊髓损伤等疾病常导致手指功能丧失。传统脑机接口(BCI)多局限于肢体大关节控制,而手指精细动作的神经解码面临巨大挑战:单个手指运动在感觉运动皮层的表征区域高度重叠,且头皮脑电图(EEG)信号存在空间分辨率低、信噪比差等固有局限。虽然植入式BCI已实现部分手指控制,但手术风险限制了其普及。如何通过非侵入方式解码个体手指运动意图,成为康复工程领域的"圣杯"。
来自卡内基梅隆大学和合作机构的研究团队在《Nature Communications》发表突破性成果,首次证明基于EEG的非侵入式BCI可实现个体手指水平的实时机器人控制。研究创新性地结合运动执行(ME)和运动想象(MI)范式,采用深度学习模型EEGNet-8,2解码头皮记录的神经信号,在21名有BCI经验的健康受试者中达到双指任务80.56%、三指任务60.61%的在线解码准确率。这项工作为开发临床可及的精细运动辅助设备奠定了重要基础。
研究采用四项关键技术:(1)128通道EEG系统采集运动相关电位;(2)EEGNet-8,2深度学习架构进行实时信号解码;(3)基于机械手的多模态反馈系统;(4)在线平滑算法提升控制稳定性。实验设计包含离线训练和在线验证两个阶段,通过五折交叉验证评估模型性能,并采用事件相关去同步(ERD)和显著性拓扑图分析神经机制。
结果
手指水平MI机器人控制

ME控制的机器人手指运动
持续训练中微调的有效性

在线平滑稳定机器人控制

讨论与展望
该研究首次实现非侵入式EEG-BCI对个体手指运动的自然映射控制,响应延迟仅1秒,媲美部分植入式系统。深度学习成功克服了EEG空间模糊的固有局限,而微调策略有效缓解了跨会话变异问题。值得注意的是,拇指-小指配对的解码性能最优(离线77.58%),而相邻食指-中指最难区分,符合皮层表征的体拓扑分布规律。
研究揭示了α频段(8-13Hz)在手指解码中的核心作用,宽带(4-40Hz)输入显著优于单频段(p<0.001)。与传统认识不同,低频运动相关电位(MRCP)在本研究的连续任务中贡献有限,这可能与实验范式差异有关。多模态反馈机制使MI任务达到与ME相近的性能,提示神经反馈可优化运动想象的神经特异性。
这项技术突破为开发临床实用的精细运动辅助设备铺平了道路。未来工作可探索:(1)结合EEG源成像提升空间分辨率;(2)纳入更多手指自由度;(3)优化深度学习架构如Transformer模型;(4)在运动障碍患者中验证疗效。随着技术的不断完善,这种自然直观的非侵入控制方式有望帮助数百万手功能受损患者重获生活自理能力。
生物通微信公众号
知名企业招聘

