
-

生物通官微
陪你抓住生命科技
跳动的脉搏
生物通官微
陪你抓住生命科技
跳动的脉搏
超轻量化柔性六维力/力矩传感器实现指尖灵巧操控的革命性突破
《Nature Communications》:An ultralight, tiny, flexible six-axis force/torque sensor enables dexterous fingertip manipulations
【字体: 大 中 小 】 时间:2025年07月02日 来源:Nature Communications 14.7
编辑推荐:
清华大学团队针对现有六维力/力矩传感器笨重、刚性且制造复杂的问题,开发出仅重0.30克、指尖尺寸的柔性传感器。该传感器通过银掺杂多孔PDMS(聚二甲基硅氧烷)和网状薄膜热敏电阻阵列,实现了Fx/Fy/Fz(±5N/0-15N)和Mx/My/Mz(±60mN・m/±20mN・m)的高精度测量,响应时间90毫秒,为机器人精细操作和残障人士辅助控制提供了突破性解决方案。
在机器人技术和人机交互领域,多维力/力矩感知是实现精细操作的核心挑战。现有六轴传感器普遍存在体积庞大(如工业级传感器常重达数百克)、刚性结构限制穿戴适用性等问题。更关键的是,柔性传感器虽能贴合生物组织,但多数仅能检测1-3个维度力信号,无法满足开瓶盖等需要同时感知压力(Fz)、剪切力(Fx/Fy)和旋转力矩(Mx/My/Mz)的复杂场景。这种技术瓶颈严重制约了康复医疗机器人、虚拟现实控制等应用的发展。
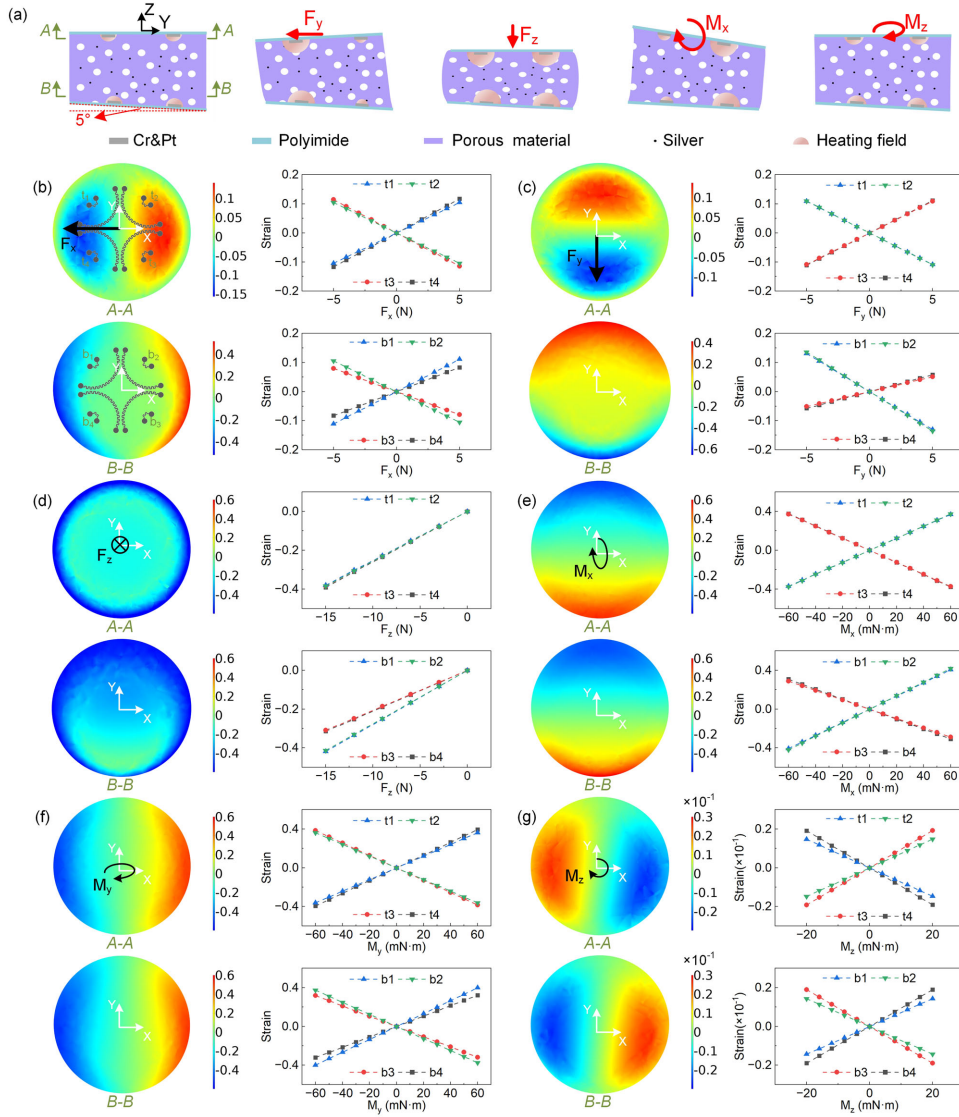
针对这一难题,清华大学的研究团队在《Nature Communications》发表了一项突破性研究。他们创新性地将热敏传感原理与弹性材料力学特性结合,开发出全球首个全柔性六维力/力矩传感器。该器件仅重0.30克(相当于三片羽毛),尺寸为12×15×5mm3,可直接贴附于指尖。通过银纳米颗粒掺杂的多孔PDMS中间层,配合上下两层Cr/Pt薄膜热敏电阻阵列,实现了对空间应变场的高灵敏度捕捉。独特的5°斜面设计使传感器能区分六维力/力矩产生的特征应变模式,经CNN(卷积神经网络)解码后,测量精度达到Fx/Fy的RMSE(均方根误差)仅0.15-0.18N,Mz为0.26mN・m。
关键技术方法包括:1)采用牺牲模板法制备银掺杂多孔PDMS(2.5vol%银含量);2)光刻工艺制作4热膜+4冷膜的网状热敏电阻阵列;3)恒温差(CTD)电路实现环境温度补偿;4)建立418组数据的CNN校准模型(含20-10神经元双层网络)。
研究结果
工作原理验证
通过有限元模拟揭示了六维力/力矩产生的特征应变场:Fx在AA/BB截面产生Y轴对称应变,Mz则因5°斜面形成独特反对称模式。实验证实热膜电压变化与应变场呈线性关系(R2>0.993)。

性能指标
传感器在100,000次-15N循环测试后仍保持稳定,湿度/温度干扰误差<3%。特别值得注意的是对Fz的检测限达0.004N,比人类指尖触觉阈值(约0.02N)更灵敏。
应用演示
在安全药瓶开启实验中,机器人通过实时监测Fz(下压力>6N)和Mz(旋转力矩)成功解锁瓶盖。残障人士用单指操控坦克游戏时,Fy>0对应前进,Fx<0实现左转,Fz>10N触发开火,展示了直观的多模态控制。

结论与展望
该研究通过热敏-力学耦合创新设计,解决了柔性传感器多维感知与微型化的矛盾。相比传统压阻/电容式传感器,其热传导检测机制对微小应变更敏感,且不受弯曲干扰。在医疗机器人领域,这种传感器可帮助残障人士完成拿取水杯(需Fz/Mx/My协同)等日常动作;在工业场景中,能提升机器人装配精度至mN・m级。未来通过集成热敏物质识别界面,有望进一步实现滑移检测、纹理识别等扩展功能,推动具身智能发展。
研究获得北京市自然科学基金(L247001)和国家自然科学基金(51735007)支持,相关代码与数据已在GitHub开源。这项技术为突破人机交互的"触觉瓶颈"提供了全新思路,其"热敏感知"范式可能引领下一代柔性电子发展方向。
 生物通微信公众号
生物通微信公众号

