
-

生物通官微
陪你抓住生命科技
跳动的脉搏
生物通官微
陪你抓住生命科技
跳动的脉搏
逆卡尔曼滤波算法在动态线性模型中的高效矩阵运算及粒子相互作用非参数估计中的应用
【字体: 大 中 小 】 时间:2025年07月22日 来源:Biometrika 1.4
编辑推荐:
本文针对动态线性模型(DLM)中大规模协方差矩阵运算的计算瓶颈,提出逆卡尔曼滤波(IKF)算法,通过精确实现线性时间复杂度的矩阵-向量乘法,显著提升了粒子相互作用函数非参数估计的效率。研究团队将IKF与共轭梯度(CG)算法结合,成功应用于显微镜细胞轨迹数据分析,为复杂物理系统中群体行为建模提供了新工具。该成果发表于《Biometrika》,为高维状态空间模型的计算优化提供了普适性解决方案。
在复杂系统的建模中,动态线性模型(DLM)因其能有效刻画时间相关数据而广泛应用,但传统方法面临高维状态空间下协方差矩阵运算的"维度灾难"。当研究细胞迁移、鸟群运动等粒子相互作用时,每个观测可能关联多个潜变量,常规卡尔曼滤波(KF)无法直接应用,而直接矩阵运算需要O(N2)计算量,使得包含数百万观测的实际问题难以求解。
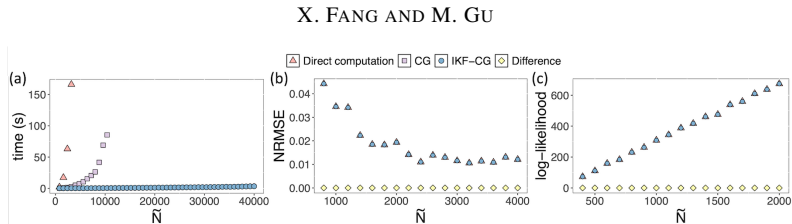
加州大学圣塔芭芭拉分校统计与应用概率系的Xinyi Fang和Mengyang Gu*团队在《Biometrika》发表的研究中,开发了逆卡尔曼滤波(IKF)算法。该算法通过创新性地反向运用卡尔曼滤波原理,实现任意实值向量与DLM协方差矩阵的精确乘法运算,将计算复杂度降至O(q3N)。研究者将IKF与共轭梯度(CG)算法整合,形成IKF-CG方法,成功应用于粒子相互作用函数的非参数估计,为群体行为研究提供了新范式。
关键技术包括:1) 建立DLM协方差矩阵的精确分解方法,通过Lemmas 1-4实现LTu和Lu的线性时间计算;2) 开发鲁棒化处理方案,通过添加人工噪声V解决数值稳定性问题;3) 构建通用协方差结构Σy=∑AjΣjAjT+Λ的快速求解框架;4) 应用于非归一化Vicsek模型和细胞运动轨迹分析,验证方法的有效性。
研究结果部分显示:
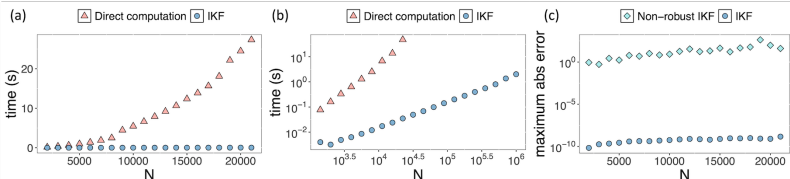
计算效率突破:在Matérn协方差(ν=2.5)测试中,IKF仅需2秒即可完成106维矩阵运算,比直接计算快三个数量级。数值实验证实该方法在噪声方差Vt→0时仍保持稳定,而传统KF会出现数值不稳定。
粒子相互作用估计:在非归一化Vicsek模型仿真中,使用np=900粒子、nτ=10时间帧数据时,交互函数预测的NRMSE低至4.4×10-3,95%置信区间覆盖率达97%。Matérn协方差(ν=2.5)相比指数协方差(ν=0.5)能获得更精确的预测。
多相互作用建模:在改进的Vicsek模型中,同时估计速度对齐和距离依赖两个交互函数。当σ02=0.12时,第二交互函数的NRMSE为1.4×10-2,证明方法对复杂交互模式的适用性。
细胞运动实证:分析2,000+人类真皮成纤维细胞的显微镜轨迹数据(36小时,20分钟间隔),发现各向异性基底导致水平方向相互作用更强。预测的细胞速度RMSE为3.5×10-3μm/min,显著优于传统Vicsek模型。
这项研究通过算法创新解决了DLM在大规模应用中的计算瓶颈,其意义体现在:1) 理论层面建立了卡尔曼滤波的逆向运算框架,拓展了状态空间模型的应用边界;2) 方法学上开发了适用于Σy=∑AjΣjAjT+Λ通用结构的精确求解方案;3) 应用上首次实现百万级粒子系统的非参数交互估计,为生物物理、群体智能等领域提供了新工具。研究者开源的FastGaSP软件包已实现核心算法,促进方法在更广泛领域的应用。未来可延伸至神经网络等大规模矩阵运算场景,并探索对数行列式的高效精确计算。
生物通微信公众号
知名企业招聘

