
-

生物通官微
陪你抓住生命科技
跳动的脉搏
生物通官微
陪你抓住生命科技
跳动的脉搏
角度依赖阻尼关节设计:机器人碰撞力降低的仿生解决方案
《Scientific Reports》:Joints with angle dependent damping can help to reduce impact forces in robots
【字体: 大 中 小 】 时间:2025年08月06日 来源:Scientific Reports 3.9
编辑推荐:
本研究针对机器人碰撞中冲击力管理的难题,提出了一种基于角度依赖阻尼(angle-dependent damping)的被动减震方案。通过流体粘滞阻尼器的间隙可调设计,研究人员实现了阻尼系数随关节角度134倍的动态变化,实验证实该设计可使碰撞峰值力降低10%,能量吸收效率提升7.1%。这项发表于《Scientific Reports》的工作为工业机械臂、腿式机器人等碰撞场景提供了硬件级解决方案,有效减轻了控制系统的负担。
在机器人技术快速发展的今天,如何优雅地处理碰撞冲击成为制约其应用的关键瓶颈。无论是工业机械臂的精准抓取,还是四足机器人的动态奔跑,突如其来的冲击力不仅可能导致机械损伤,更会引发控制系统失稳。传统解决方案如软质缓冲垫或高带宽控制各有局限――前者牺牲了结构刚性,后者则面临响应延迟的挑战。这种困境与飞机起落架的减震需求惊人相似,但机器人关节的紧凑空间对阻尼器设计提出了更苛刻的要求。
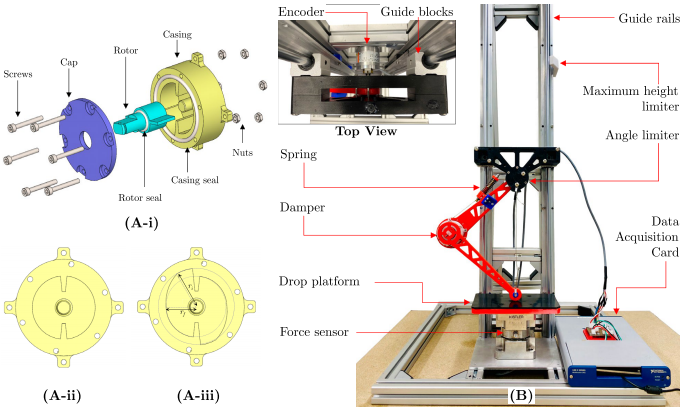
英国帝国理工学院(Imperial College London)的Shehara Perera团队从人类膝关节的生物力学特性中获得灵感,发现肌肉收缩随屈曲角度增加会提升关节阻尼特性。基于这一发现,他们设计出革命性的角度依赖可变阻尼关节,通过旋转叶片阻尼器中精密的间隙渐变结构(0.5-5mm变化范围),实现了阻尼系数随角度非线性调节的仿生特性。这项发表于《Scientific Reports》的研究表明,该设计可使理论峰值力降低48%,实验验证中实际减震效果达10%,为机器人硬件设计开辟了新路径。
研究团队采用多学科交叉方法:1)建立两段式集中质量模型进行动力学解析,2)通过计算流体力学(CFD)模拟硅油(100000 cSt)在变间隙流道中的湍流特性,3)3D打印(FDM工艺)制备PETG材质阻尼器原型,4)80cm跌落测试平台结合三轴力传感器(Kistler 9367C)和编码器(Kubler KIH40)采集数据。
角度依赖阻尼的解析模型
建立包含弹簧刚度k和阻尼系数c的双连杆模型,推导出地面反作用力Fy与关节角θ的数学关系。数值模拟显示,当阻尼梯度Δc=1 Nms/rad时,峰值力比恒定阻尼降低48%,验证了角度依赖调节的理论优势。
流体阻尼器的创新设计
CFD分析证实,5mm至0.5mm的间隙变化可使阻尼系数提升134倍。SST k-ω湍流模型显示,40°变化角度的设计能产生最平滑的阻尼过渡,避免流体分离导致的非线性突变。
跌落实验验证
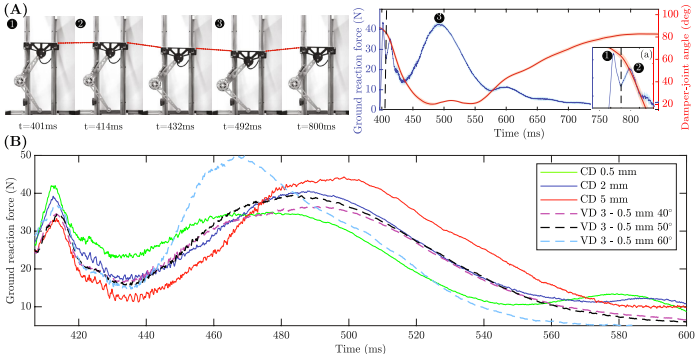
3-0.5mm变间隙阻尼器在80cm跌落中表现出最佳性能,峰值力36.45N(比最优恒定阻尼降低10.2%),能量效率达69.45%。加速度计数据证实该设计能过滤92%的高频冲击振动。
这项研究的突破性在于将生物关节的智能阻尼特性转化为工程解决方案。不同于需要复杂传感器的主动控制,这种被动设计通过精妙的机械结构实现"硬件智能",特别适合极端环境下的机器人应用。尽管当前原型在重复冲击后可能出现硅油泄漏,但研究团队指出耦合可变弹簧系统可进一步优化性能。该成果不仅为机器人减震设计提供了新范式,其变间隙流体控制机制对航空航天阻尼器、汽车悬架等领域也有重要借鉴价值。随着3D打印精度的提升,这种仿生阻尼关节有望成为下一代协作机器人的标准配置。
生物通微信公众号

