
-

生物通官微
陪你抓住生命科技
跳动的脉搏
生物通官微
陪你抓住生命科技
跳动的脉搏
基于改进麻雀算法优化BP神经网络的机器人手术中工具-组织交互力精准预测研究
【字体: 大 中 小 】 时间:2025年08月13日 来源:BMC Surgery 1.8
编辑推荐:
本研究针对机器人辅助微创手术(RAMIS)中因缺乏力反馈导致的软组织损伤问题,提出了一种基于改进麻雀搜索算法(ISSA)优化的BP神经网络(ISSA-BPNN)模型,通过动态参数和几何特征预测钳夹力。研究通过猪肾组织压缩实验验证,ISSA-BPNN模型的R2达99.24%,显著优于传统BP及其他优化算法,为提升手术安全性和精准度提供了创新解决方案。
在机器人辅助微创手术(RAMIS)领域,缺乏力反馈一直是困扰外科医生的核心难题。由于无法直接感知手术器械与组织的交互力,医生可能因施加过大钳夹力导致软组织损伤,或因力度不足影响手术效率。传统解决方案如电磁传感器易受干扰,光纤光栅(FBG)存在集成困难,而基于视觉或电机电流的间接测量方法则面临建模误差大、实时性差等局限。如何实现高精度、高稳定性的术中力预测,成为提升RAMIS安全性和操作体验的关键科学问题。
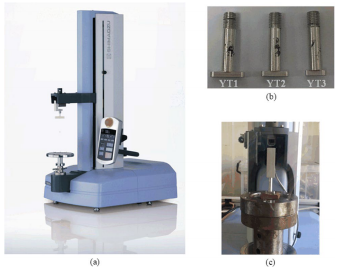
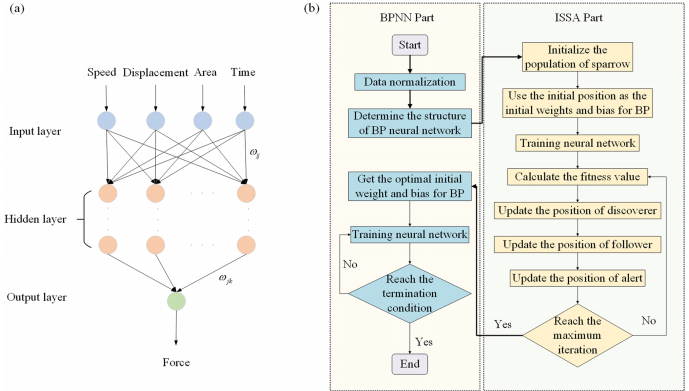
针对这一挑战,北京航空航天大学的研究团队在《BMC Surgery》发表了一项创新研究。该团队通过改进麻雀搜索算法(ISSA)优化BP神经网络,构建了能够精准预测钳夹力的ISSA-BPNN模型。研究首先设计了三类不同尺寸的钳夹刀具(YT1-YT3),在0.5-2 mm/s四种加载速度下对猪肾组织进行压缩实验,采集了加载-松弛全周期的力学数据。基于这些数据,研究人员引入圆形混沌映射、黄金正弦和十字交叉策略对传统麻雀算法(SSA)进行三重改进:圆形混沌映射使初始种群分布更均匀;黄金正弦策略增强全局搜索能力;十字交叉策略则通过横向纵向交叉避免局部最优。优化后的ISSA算法用于调整BP神经网络的权重和阈值,最终建立的预测模型以接触面积、速度、位移和时间作为输入,钳夹力作为输出。
关键技术方法
研究采用SHIMADZU EZ-LX万能试验机进行猪肾组织压缩实验,通过单因素方差分析(ANOVA)验证数据可重复性。ISSA-BPNN模型构建包含数据归一化、网络拓扑确定(4-9-1结构)、ISSA参数初始化(种群数30、迭代5次)等步骤,通过RMSE、MSE、MAE、SSE和R2五项指标评估性能。
主要研究结果
压缩实验结果:力-位移曲线显示钳夹力随压缩深度呈指数增长,2 mm后增速显著;力-时间曲线表明松弛期力值呈指数衰减,10秒后趋于稳定。不同钳具(YT1-YT3)和速度(0.5-2 mm/s)组合下,接触面积和速度均显著影响峰值力(P<0.05)。
模型预测性能:ISSA-BPNN的R2达99.24%,较传统BP(97.12%)提升2.12个百分点,MSE降低55%。如图6所示,其预测曲线与实测值重合度最高,误差波动幅度最小。
消融实验验证:完整ISSA策略组合的预测性能最优,双策略组合(YG-ISSA、YZ-ISSA等)次之,单一策略改进模型表现最差,证实多策略协同增效作用。
研究结论与意义
该研究通过生物力学实验与智能算法创新的深度融合,首次将改进麻雀算法应用于手术力预测领域。ISSA-BPNN模型不仅克服了传统传感器依赖环境、易受干扰的缺陷,还显著提升了预测精度和实时性(R2 99.24%,预测延迟~50ms)。尤为重要的是,研究揭示了钳具几何参数(接触面积)与运动参数(速度)对组织力学响应的定量影响规律,为手术器械优化设计提供了理论依据。未来通过扩展至肝脏、胃肠等多组织验证,并集成实时反馈硬件,这项技术有望成为RAMIS系统中智能力感知的标准解决方案,推动手术机器人向更安全、更精准的方向发展。
生物通微信公众号
知名企业招聘

