
-

ЙъОпНЁ№ЩОў
ЕгДгЧҘЧЎЙъГьҝЖјј
Мш¶ҜөДВцІ«
ЙъОпНЁ№ЩОў
ЕгДгЧҘЧЎЙъГьҝЖјј
Мш¶ҜөДВцІ«
ЦӘК¶ТэөјөДЧФС§П°ҝШЦЖІЯВФЈәҪвҫц»мәПіөБҫ¶УБРСУіЩОКМвөДҙҙРВ·Ҫ°ё
ЎҫЧЦМеЈә ҙу ЦР РЎ Ўҝ КұјдЈә2025Дк08ФВ20ИХ АҙФҙЈәNature Communications 15.7
ұајӯНЖјцЈә
ЎЎЎЎХл¶ФЧФ¶ҜјЭК»Улҙ«НііөБҫ»мРРөјЦВөДҪ»НЁР§ВКөНПВј°НЁРЕСУіЩОКМвЈ¬СРҫҝНЕ¶УМбіцЦӘК¶ТэөјөДЧФС§П°»мәП¶УБРҝШЦЖҝтјЬЎЈёГСРҫҝХыәПФЛ¶ҜІЁДЈРНәНNewellёъіЫДЈРНФӨІвҙ«НііөБҫРРОӘЈ¬ҪбәПёДҪшөДSACЛг·ЁҙҰАнСУіЩОКМвЎЈ·ВХжПФКҫёГІЯВФФЪҪ»НЁОИ¶ЁРФЎўДЬәДәНКжККРФ·ҪГжУЕУЪПЦУР·Ҫ·ЁЈ¬ОӘБгКВ№К»мБчҪ»НЁ№ЬАнМṩͨУГҪвҫц·Ҫ°ёЎЈ
ЛжЧЕЧФ¶ҜјЭК»јјКхҝмЛЩ·ўХ№Ј¬SAE Level 5ј¶ЧФ¶ҜјЭК»іөБҫФӨјЖҪ«ФЪ205ДкХјҫЭ10%-71%өДРРК»АпіМЎЈИ»¶шФЪОҙАҙјёК®ДкДЪЈ¬ЧФ¶ҜјЭК»іөБҫУлҙ«НіИЛАајЭК»іөБҫ»мРРөДҪ»НЁ»·ҫіҪ«іЙОӘіЈМ¬ЎЈХвЦЦ»мәПҪ»НЁДЈКҪГжБЩБҪҙуәЛРДМфХҪЈәИЛАајЭК»РРОӘөДЛж»ъРФәНТмЦКРФЈ¬ТФј°іөБӘНшНЁРЕЦРІ»ҝЙұЬГвөДСУіЩОКМвЎЈПЦУРСРҫҝ¶аҫЫҪ№өҘТ»АаРНіөБҫ¶УБРҝШЦЖЈ¬ДСТФУҰ¶Ф»мБчҪ»НЁЦРИЛАајЭК»іөБҫН»И»јУјхЛЩТэ·ўөДҪ»НЁХсөҙЈЁИзНј1bЛщКҫЈ©Ј¬ёьОЮ·ЁУРР§ҪвҫцV2XНЁРЕЦРЛж»ъСУіЩ¶ФҝШЦЖРФДЬөДУ°ПмЎЈ
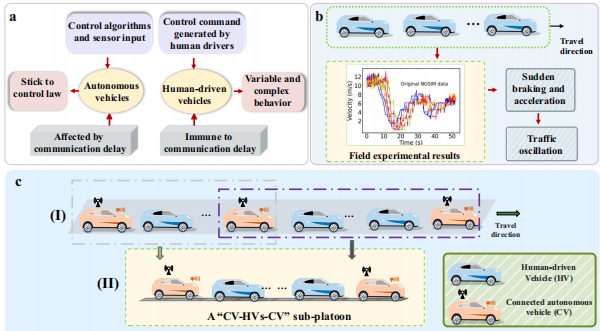
Хл¶ФХвР©МфХҪЈ¬Jingyao WangөИСРҫҝХЯФЪЎ¶Nature CommunicationsЎ··ўұнСРҫҝЈ¬МбіцЦӘК¶ТэөјөДЧФС§П°ҝШЦЖҝтјЬЎЈёГСРҫҝҙҙРВРФөШІЙУГ"іө-В·-ФЖ"РӯН¬јЬ№№ЈЁНј2Ј©Ј¬НЁ№эИэёц№ШјьјјКхН»ЖЖЈәКЧПИҪ«ҙ«НііөБҫјҜИәРРОӘҪЁДЈОӘөҘТ»КөМеЈ¬»щУЪФЛ¶ҜІЁДЈРНәНNewellёъіЫДЈРНФӨІвЖдЖЪНыКұұдіөН·КұҫаHi-jәНҫІЦ№јдҫаLi-jЈ»ЖдҙОФЪSACЛг·ЁЧҙМ¬ұнКҫЦРИЪәПАъК·ҝШЦЖЦёБоТФІ№іҘСУіЩЈ»ЧоәуЙијЖ»щУЪDRLөДДЈРНЗР»»»ъЦЖУҰ¶ФЛж»ъСУіЩЎЈСРҫҝК№УГNGSIMХжКөҪ»НЁКэҫЭјҜСөБ·Ј¬ФЪ100ҙОЛж»ъСУіЩ·ВХжЦРұЈіЦОИ¶ЁРФДЬЎЈ

ЎҫСРҫҝ·Ҫ·ЁЎҝ
СРҫҝІЙУГФЖ¶ЛІҝКрөДSACЛг·ЁЧчОӘәЛРДҝШЦЖЖчЈ¬НЁ№эV2XНЁРЕ»сИЎіөБҫЧҙМ¬ЎЈ№ШјьјјКх°ьАЁЈә1) »щУЪФЛ¶ҜІЁЛЩ¶ИwvәНЧиИыГЬ¶ИcdөДјҜИәРРОӘФӨІвДЈРНЈЁ№«КҪ25-28Ј©Ј»2) ИЪәПАъК·ҝШЦЖЦёБоөДЧҙМ¬ұнКҫЙијЖЈЁ№«КҪ35Ј©Ј»3) СУіЩЗшјд»®·ЦөДДЈРНЗР»»»ъЦЖЈ»4) °ьә¬КжКК¶ИjjerkәНДЬәДeecoөД¶аДҝұкҪұАшәҜКэЈЁ№«КҪ37Ј©ЎЈКөСйІЙУГјУЦЭI-80№«В·NGSIMХжКөКэҫЭЈ¬№№ҪЁ°ьә¬7БҫіөөД»мәП¶УБРҪшРРСйЦӨЎЈ
ЎҫСРҫҝҪб№ыЎҝ
ҝШЦЖРФДЬұИҪП
Улҙ«НіDRLЛг·ЁПаұИЈ¬ЦӘК¶ТэөјSACІЯВФФЪЧиДбұИgpЈЁ0.54 vs 0.7Ј©ЎўКжКК¶ИіЙұҫЈЁҪөөН32.1%Ј©әНДЬәДЈЁҪөөН33.9%Ј©өИЦёұкҫщПФЦшУЕФҪЈЁНј4Ј©ЎЈМШұрКЗФЪіөБҫ»»өАіЎҫ°КөПЦБгЕцЧІВКЈЁНј10Ј©Ј¬¶шDDPGәНPPOЛг·ЁіцПЦ№мјЈҪ»ІжЎЈ

СУіЩВі°фРФСйЦӨ
ФЪСУіЩІЁ¶Ҝҙп2ҰӨTЈЁҰӨT=0.1sЈ©КұЈ¬өЪ2БҫCAVјУЛЩ¶И·щЦөұЈіЦ1.5m/s2ТФДЪөДОИ¶ЁұнПЦЈЁНј6Ј©ЎЈ100ҙОЛж»ъСУіЩКөСйЦРЈ¬ёъЛжіөБҫРФДЬЦёұкЦРО»КэКјЦХУЕУЪЗ°іөЈЁНј8Ј©Ј¬ЦӨГчДЈРНЗР»»»ъЦЖөДУРР§РФЎЈ

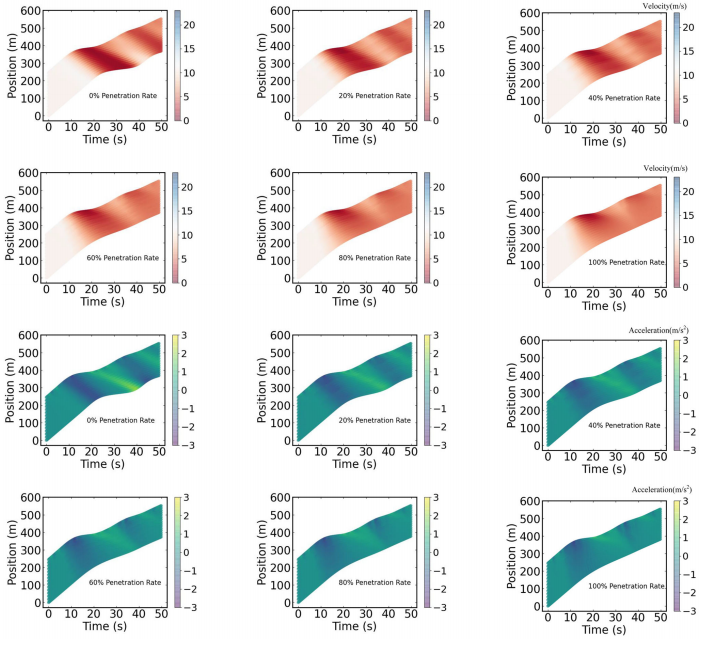
ЙшНёВКУ°Пм
өұCAVЙшНёВКҙУ0%МбЙэЦБ100%КұЈ¬Ҫ»НЁБчОИ¶ЁРФfflowМбёЯ8.7%ЈЁұн1Ј©ЎЈИИБҰНјПФКҫЈЁНј7Ј©Ј¬ҙҝИЛАајЭК»¶УБР»біцПЦЛЩ¶И№йБгөДҪ»НЁЧиИыЈ¬¶ш»мәП¶УБРДЬУРР§ТЦЦЖХсөҙҙ«ІҘЎЈ
ЎҫҪбВЫУлТвТеЎҝ
ёГСРҫҝН»ЖЖРФөШҪвҫцБЛ»мБчҪ»НЁЦРРРОӘФӨІвәНСУіЩІ№іҘБҪҙуДСМвЎЈНЁ№эЦӘК¶ТэөјУлКэҫЭЗэ¶ҜөДИЪәПЈ¬МбіцөДҝШЦЖҝтјЬҫЯУРИэҙуУЕКЖЈә1) ОЮРиҫ«И·»сИЎИЛАајЭК»іөБҫІОКэҰЛi-jәНҰДi-jЈ»2) ҝЙККУҰ0.2-2.0ҰӨTөДЛж»ъСУіЩЈ»3) ФЪ»»өАөИёҙФУіЎҫ°ұЈіЦБгЕцЧІВКЎЈПаұИПЦУР·Ҫ·ЁЈ¬ФЪҪ»НЁОИ¶ЁРФЎўДЬәДәНКжККРФөИЦёұкЙПКөПЦИ«ГжМбЙэЈ¬ОӘОҙАҙЦЗ»ЫҪ»НЁПөНіМṩҝЙА©Х№өДҪвҫц·Ҫ°ёЎЈСРҫҝҙъВлТСҝӘФҙЈ¬ОӘәуРшСРҫҝМṩЦШТӘ»щЧјЎЈ
ЙъОпНЁОўРЕ№«ЦЪәЕ
ЦӘГыЖуТөХРЖё
ҪсИХ¶ҜМ¬ | ИЛІЕКРіЎ | РВјјКхЧЁАё | ЦР№ъҝЖС§ИЛ | ФЖХ№МЁ | BioHot | ФЖҪІМГЦұІҘ | »бХ№ЦРРД | МШјЫЧЁАё | јјКхҝмС¶ | Гв·СКФУГ
°жИЁЛщУР ЙъОпНЁ
Copyright© eBiotrade.com, All Rights Reserved
БӘПөРЕПдЈә
ФБICPұё09063491әЕ
