
-

ЩњЮяЭЈЙйЮЂ
ХуФузЅзЁЩњУќПЦММ
ЬјЖЏЕФТіВЋ
ЩњЮяЭЈЙйЮЂ
ХуФузЅзЁЩњУќПЦММ
ЬјЖЏЕФТіВЋ
ЖрКНЕуЪгОѕв§ЕМЯТЕФЖЏЬЌзЊЯђПижЦЃКЛљгкааЖЏФмСІЕФЗТЩњЕМКНВпТдбаОП
ЁОзжЬхЃК Дѓ жа аЁ ЁП ЪБМфЃК2025Фъ08дТ26Ше РДдДЃКScientific Reports 3.9
БрМЭЦМіЃК
ЁЁЁЁБОбаОПеыЖдИпЫйдЫЖЏжаШчКЮЭЈЙ§ЪгОѕаХЯЂСЌајПижЦзЊЯђвдДЉдНЖрИіКНЕуЕФЙиМќЮЪЬтЃЌЭЈЙ§ЮоШЫЛњФЃФтЪЕбщНвЪОСЫШЫРрЛљгкааЖЏФмСІЃЈaffordance-based controlЃЉЕФЕМКНВпТдЁЃбаОПШЫдБВйзнЕкШ§КНЕуЃЈGate 2ЃЉЕФНЧЖШЁЂОрРыКЭЗНЯђВЮЪ§ЃЌНсКЯВЛЭЌУєНнЖШЕФЮоШЫЛњЖЏСІбЇФЃаЭЃЈExperiment 1ЮЊИпЙпад/Experiment 2ЮЊИпУєНнЃЉЃЌЗЂЯжЪмЪдепЛсИљОнздЩэааЖЏФмСІБпНчЕїећЙьМЃЃКИпЙпадЬѕМўЯТГЪЯж"ЯШЦЋРыКѓЛиЕї"ЕФЦНЛЌзЊЯђФЃЪНЃЌЖјИпУєНнЬѕМўЯТВЩгУжБНгНгНќВпТдЁЃИУГЩЙћЗЂБэгкЁЖScientific ReportsЁЗЃЌЮЊздЖЏМнЪЛКЭЛњЦїШЫЕМКНЬсЙЉСЫЗТЩњПижЦРэТлвРОнЃЌжЄЪЕСЫааЖЏФмСІЯожЦЖддЫЖЏЙцЛЎЕФКЫаФгАЯьЁЃ
дкИпЫйДЉдНИДдгЛЗОГЪБЃЌЮоТлЪЧЮоШЫЛњОКЫйбЁЪжЛЙЪЧЧЈсужаЕФФёРрЃЌЖМашвЊдкКСУыМЖЪБМфФкСЌајЕїећдЫЖЏЙьМЃвдДЉдНЖрИіКНЕуЁЃетвЛЙ§ГЬЩцМАЖдЪгОѕаХЯЂЃЈoptic flowЃЉЕФЪЕЪБНтЮігыЖЏзїжДааЕФОЋзМаЕїЃЌЕЋГЄЦквдРДДцдкКЫаФељвщЃКШЫРрОПОЙШчКЮРћгУЮДРДКНЕуаХЯЂЃПЪЧЯёЛњЦїШЫСьгђГЃгУЕФ"МгШЈЮќв§згФЃаЭ"ФЧбљж№ВНЧаЛЛФПБъЃЌЛЙЪЧЛљгкМИКЮдМЪјЕФ"КуЖЈЧњТЪВпТд"ЃЌвжЛђЪЧЪмздЩэааЖЏФмСІЯожЦЕФЪЪгІадПижЦЃП
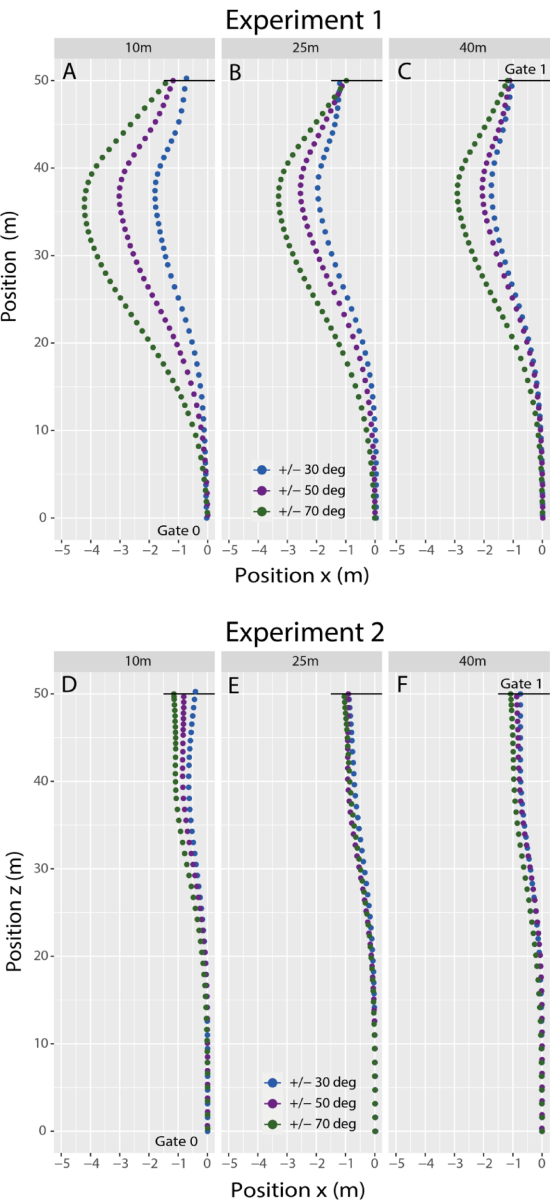
ЮЊНтД№етаЉЮЪЬтЃЌA.J. JansenгыBrett R. FajenдкЁЖScientific ReportsЁЗЗЂБэЕФбаОПжаЃЌЩшМЦСЫвЛЬзОЋУюЕФЮоШЫЛњФЃФтЪЕбщЯЕЭГЁЃЭЈЙ§Unityв§ЧцЙЙНЈШ§ЮЌЛЗОГЃЌЩшжУЙЬЖЈЮЛжУЕФGate 0ЃЈЦ№ЕуЃЉКЭGate 1ЃЈЕквЛКНЕуЃЉЃЌЖЏЬЌЕїећGate 2ЃЈЕкЖўКНЕуЃЉЕФНЧЖШЃЈЁР30Ёу/50Ёу/70ЁуЃЉЁЂОрРыЃЈ10/25/40 mЃЉКЭЗНЯђЃЈ0Ёу/ЁР20ЁуЃЉВЮЪ§ЁЃ19УћЪмЪдепдкExperiment 1жаВйПиИпЙпадЮоШЫЛњЃЈзюДѓНЧЫйЖШ54Ёу/sЃЌзюаЁзЊЭфАыОЖ7.35 mЃЉЃЌ20УћЪмЪдепдкExperiment 2жаВйПиИпУєНнЮоШЫЛњЃЈзюДѓНЧЫйЖШ78Ёу/sЃЌПЩСуАыОЖзЊЯђЃЉЃЌЭЈЙ§XboxПижЦЦїЭъГЩШ§КНЕуДЉдНШЮЮёЁЃбаОПВЩгУжиИДВтСПANOVAЗжЮіЙьМЃВЮЪ§ЃЌЭЈЙ§95%жУаХЧјМфЃЈLoftus-MassonЗЈЃЉЦРЙРЬѕМўВювьЁЃ
ЙьМЃЬиеїЗжЮі
ИпЙпадзщЃЈExperiment 1ЃЉЪ§ОнЯдЪОЃЌЪмЪдепдкНгНќGate 1ЧАЛсЯШЯђGate 2ЗДЗНЯђЦЋвЦЃЈзюДѓЦЋРы-2.22 mЃЉЃЌаЮГЩРрЫЦ

КНЕуГЏЯђгАЯь
гыНЧЖШКЭОрРыЕФЧПаЇгІЯрЗДЃЌGate 2ЗНЯђВЮЪ§ЖдЙьМЃгАЯьЮЂШѕЃЈІЧ2G<0.03ЃЉЃЌетгыЧАШЫбаОПвЛжТЁЃзїепЭЦВтПЩФмЪЧдЖОрРыЪБЗНЯђаХЯЂФбвдБцЪЖЫљжТЃЌЕЋвВВЛХХГ§ЪЕбщЩшжУЕФЗНЯђБфЛЏЗЖЮЇЃЈЁР20ЁуЃЉЮДДЅМАааЮЊЕїећуажЕЁЃ
ЪЇАмТЪЖдБШ
ИпЙпадзщдкМЋЖЫЬѕМўЃЈ70ЁуНЧ+10 mОрРыЃЉЯТДэЙ§Gate 1ЕФИХТЪДя22%ЃЌЖјИпУєНнзщНі9.25%ЃЌгЁжЄСЫааЖЏФмСІБпНчЖдШЮЮёГЩЙІТЪЕФКЫаФжЦдМЁЃжЕЕУзЂвтЕФЪЧЃЌМДЪЙЪЇАмАИР§жаЃЌЪмЪдепШдБэЯжГігыГЩЙІЪдбщЯрЫЦЕФЙьМЃФЃЪНЃЌЫЕУїДэЮѓдДгкЖдФмСІБпНчЙРМЦЕФЮЂаЁЦЋВюЖјЗЧВпТдИФБфЁЃ
етЯюбаОПЭЈЙ§ЫЋЪЕбщЖдееЃЌЪзДЮЪЕжЄСЫШЫРрдкЖрКНЕуЕМКНжаВЩгУ"ааЖЏФмСІЮЌГжВпТд"ЃЈaffordance-based controlЃЉЁЊЁЊМДИљОнздЩэЛђдиОпЕФЖЏЬЌЯожЦЃЈШчзюДѓНЧЫйЖШ/зюаЁзЊЭфАыОЖЃЉЪЕЪБЕїећЙьМЃЃЌЖјЗЧМђЕЅзёбМИКЮзюгХТЗОЖЁЃИУЗЂЯжВЛНіЗёЖЈСЫДЋЭГЛњЦїШЫСьгђЕФСНДѓМйЩшЃЈМгШЈЮќв§згФЃаЭКЭКуЖЈЧњТЪВпТдЃЉЃЌИќНвЪОСЫЩњЮяЕМКНЯЕЭГЕФКЫаФддђЃКдЫЖЏПижЦБОжЪЩЯЪЧааЖЏПЩФмадПеМфЕФЖЏЬЌЙмРэЁЃ
дкгІгУВуУцЃЌИУГЩЙћЮЊЮоШЫЛњзджїЕМКНЫуЗЈЬсЙЉСЫЗТЩњЩшМЦПђМмЃЌЧПЕїашНЋЛњаЕЖЏСІбЇЯожЦФЩШыПижЦФЃаЭЁЃРэТлВуУцдђЭЦНјСЫЩњЬЌаФРэбЇЃЈecological psychologyЃЉгыааЮЊЖЏСІбЇЕФШкКЯЃЌЬсЪОЮДРДбаОПашЬНЫїИќИДдгЕФааЖЏФмСІбЇЯАЛњжЦЁЊЁЊе§ШчзїепжИГіЃК"ЕБЪмЪдепЪзДЮВйПиИпЙпадЮоШЫЛњЪБЃЌЫћУЧШчКЮбИЫйСьЮђЕНашвЊВЩгУЦЋРы-ЛиЕїВпТдЃПетжИЯђСЫШЫРрИажЊ-ааЖЏЯЕЭГЩюВуЕФЪЪгІаджЧЛлЁЃ"
ЩњЮяЭЈЮЂаХЙЋжкКХ
жЊУћЦѓвЕеаЦИ
НёШеЖЏЬЌ | ШЫВХЪаГЁ | аТММЪѕзЈРИ | жаЙњПЦбЇШЫ | дЦеЙЬЈ | BioHot | дЦНВЬУжБВЅ | ЛсеЙжааФ | ЬиМлзЈРИ | ММЪѕПьбЖ | УтЗбЪдгУ
АцШЈЫљга ЩњЮяЭЈ
Copyright© eBiotrade.com, All Rights Reserved
СЊЯЕаХЯфЃК
дСICPБИ09063491КХ
