
-

…ζΈοΆ®ΙΌΈΔ
≈ψΡψΉΞΉΓ…ζΟϋΩΤΦΦ
ΧχΕ·ΒΡ¬ω≤Ϊ
…ζΈοΆ®ΙΌΈΔ
≈ψΡψΉΞΉΓ…ζΟϋΩΤΦΦ
ΧχΕ·ΒΡ¬ω≤Ϊ
…ώΨ≠Άχ¬γΒςΩΊ”Ωœ÷––ΈΣΘΚ¥”Ρώ»Κ÷«ΡήΒΫΉ‘«ΐΕ·ΝΘΉ”œΒΆ≥ΒΡΨΪ»ΖΩΊ÷Τ
ΓΨΉ÷ΧεΘΚ ¥σ ÷– –Γ ΓΩ ±ΦδΘΚ2025Ρξ09‘¬25»’ ά¥‘¥ΘΚCell Reports Physical Science 7.3
±ύΦ≠ΆΤΦωΘΚ
ΓΓΓΓ±ΨΩ·ΆΤΦωΘΚΈΣΫβΨωΗ¥‘”œΒΆ≥÷–Φ·Χε‘ΥΕ·ΩΊ÷ΤΡ―ΧβΘ§―–ΨΩ»Υ‘±ΩΣ’ΙΜυ”ΎΈοάμ–≈œΔ…ώΨ≠Άχ¬γΘ®PINNΘ©ΒΡ”Ωœ÷––ΈΣΒςΩΊ―–ΨΩΓΘΆ®ΙΐΙΙΫ®ΦφΨΏΨύάκΝΠΘ®f(rij)Θ©”κΕ‘ΤκΝΠΘ®g(rij)Θ©ΒΡΫΜΜΞΡΘ–ΆΘ§ Βœ÷ΝΥΈ––ΐ»ΚΦ·ΑκΨΕΓΔ¥Ί»Κ≥Ώ¥γΒ»ΦΗΚΈΧΊ’ςΒΡΨΪ»Ζ≤ΌΩΊΘ§≤Δ≥…ΙΠΗ¥œ÷ΝΥΗκΉ”GPS ΐΨίΒΡ≤ψΦΕΝλΒΦ-ΗζΥφΕ·ΝΠ―ßΓΘΗΟΩρΦήΈΣΜζΤς»ΥΦ·»ΚΒΦΚΫΓΔΜν–‘Έο÷ Ήι÷·ΦΑ…ζΈοΦ·»Κ“ΰΙφ‘ρΆΎΨρΧαΙ©ΝΥ–¬ΖΕ ΫΓΘ
‘ΎΉ‘»ΜΫγ÷–Θ§¥”œΗΑϊ«®“ΤΓΔœΗΨζ»Κ¬δΒΫΡώ»ΚΚΆ”ψ»ΚΘ§ΗωΧεΦδΒΡΨ÷≤ΩœύΜΞΉς”ΟΆυΆυΡήΉ‘ΖΔ–Έ≥…ΗΏΕ»–≠ΒςΒΡΦ·Χε‘ΥΕ·ΓΘ’β÷÷±Μ≥ΤΈΣ"”Ωœ÷––ΈΣ"ΒΡœ÷œσΘ§Ζ¥”≥ΝΥΈό÷––ΡΨω≤ΏœΒΆ≥÷–»ΚΧε≤ψΟφΒΡΙ≤ ΕΓΘΨΓΙήΙΐ»ΞΦΗ °ΡξΦδΘ§―–ΨΩ’ΏΆ®ΙΐΉ‘«ΐΕ·ΝΘΉ”Θ®SPPΘ©ΡΘ–ΆΓΔBoidsΡΘ–ΆΒ»άμ¬έΩρΦήΘ§“‘ΦΑΜυ”ΎΉν¥σλΊ‘≠άμΒΡΆ≥ΦΤΝΠ―ßΖΫΖ®Θ§Ε‘Φ·Χε‘ΥΕ·ΒΡ–Έ≥…Μζ÷ΤΫχ––ΝΥ…ν»κΧΫΥςΘ§ΒΪ»γΚΈ÷ςΕ·ΩΊ÷Τ’β–©––ΈΣΓΣΓΣάΐ»γΨΪ»ΖΒςΩΊΤδ≥ωœ÷ ±ΜζΓΔΦΗΚΈΧΊ’ςΚΆ‘ΥΕ·ΡΘ ΫΓΣΓΣ Φ÷’ «Νλ”ρΡΎ–ϋΕχΈ¥ΫβΒΡΡ―ΧβΓΘ¥ΪΆ≥ΖΫΖ®ΆυΆυΨ÷œό”ΎΈ»Χ§Ζ÷ΈωΘ§Ρ―“‘¥”»Έ“β≥θ ΦΧθΦΰ Βœ÷¬≥ΑτΩΊ÷ΤΘ§«“‘Ύ¥Πάμœ÷ ΒΜΖΨ≥÷–ΒΡ’œΑ≠ΈοΚΆΩ’Φδ‘Φ χ ±±μœ÷ΖΠΝΠΓΘ
’κΕ‘’β“ΜΧτ’ΫΘ§ΖΔ±μ”ΎΓΕCell Reports Physical ScienceΓΖΒΡ―–ΨΩΧα≥ωΝΥ“Μ÷÷Μυ”ΎΈοάμ–≈œΔ…ώΨ≠Άχ¬γΘ®Physics-Informed Neural Networks, PINNΘ©ΒΡ¥¥–¬ΩρΦήΓΘΗΟΩρΦήΆ®Ιΐ…ώΨ≠Άχ¬γ―ßœΑΗωΧεΦδΒΡΫΜΜΞΙφ‘ρΘ§ Βœ÷ΝΥΕ‘Εύ÷÷Φ·Χε‘ΥΕ·ΒΡΨΪ»Ζ…ζ≥…”κΕ·Χ§ΩΊ÷ΤΘ§≤ΜΫω≥…ΙΠΗ¥œ÷ΝΥ’φ ΒΗκ»ΚΒΡΖ…––ΙλΦΘΘ§ΜΙ―ί ΨΝΥ‘ΎΗ¥‘”ΜΖΨ≥÷–ΒΡ ”Π–‘––ΈΣΓΘ
―–ΨΩΆ≈Ε”≤…”ΟΒΡΚΥ–ΡΦΦ θΖΫΖ®Αϋά®ΘΚ1) ΙΙΫ®Μυ”ΎΕύœν ΫΦΕ ΐΒΡΫΜΜΞΝΠΚ· ΐΘ®f(rij)=ΓΤakrijnkΚΆg(rij)=ΓΤbkrijmkΘ©Θ§Τδ÷–œΒ ΐ”κ÷Η ΐΨυΈΣΩ…―ΒΝΖ≤Έ ΐΘΜ2) ΫΪά ÷°ΆρΕ·ΝΠ―ßΖΫ≥Χ«Ε»κΥπ ßΚ· ΐΘ§»Ζ±ΘΈοάμΙφ¬…‘Φ χΘΜ3) Ι”ΟΗκΉ”GPSΉΖΉΌ ΐΨίΘ®Κ§10÷ΜΗωΧεΙλΦΘΘ©―ΒΝΖΖ«ΗςœρΆ§–‘ΫΜΜΞΡΘ–ΆΘΜ4) Ά®ΙΐAdamΚΆL-BFGS”≈Μ·ΤςΝΣΚœ”≈Μ·…ώΨ≠Άχ¬γ≤Έ ΐ”κΫΜΜΞΚ· ΐ≤Έ ΐΘΜ5) “ΐ»κ÷ςΕ·ΫΜΜΞΫ«Κ· ΐh(Π»ij)ΡΘΡβΡώάύ ”“ΑΧΊ–‘ΓΘ
¥¥Ϋ®ΚΆΩΊ÷ΤΒδ–ΆΦ·Χε‘ΥΕ·
Ά®ΙΐΒςΫΎΕ‘ΤκΝΠ”κΨύάκΝΠΒΡΉιΚœΘ§―–ΨΩ Βœ÷ΝΥ”––ρΧ§ΓΔΜΖΉ¥ΓΔ¥Ί»ΚΓΔΡΞΖΜΚΆΦ·»ΚΈε÷÷Ψ≠ΒδΦ·Χε‘ΥΕ·ΡΘ ΫΒΡΨΪ»ΖΩΊ÷ΤΓΘ…ώΨ≠Άχ¬γΩ…Ά®ΙΐΒς’ϊΫΜΜΞΚ· ΐœΒ ΐΘ§ΩΊ÷Τ”––ρΧ§ΉΣ±δ ±ΦδΘ®Έσ≤ν<1.4%Θ©Θ§≤ΔΨΪΉΦΒςΩΊΈ––ΐΑκΨΕΘ®RΘ©ΚΆ¥Ί»Κ≥Ώ¥γΘ®Π≈Θ©ΓΘΧΊ±π÷ΒΒΟΉΔ“βΒΡ «Θ§―–ΨΩΖΔœ÷ΝΥΒΞΡΞΖΜΡΘ Ϋ÷––ΐΉΣΖΫœρΒΡ≥θ ΦΧθΦΰ“άάΒ–‘ΓΣΓΣΨΓΙήΫΜΜΞΡΘ–ΆΩ…“ΐΒΦ–Έ≥…ΒΞœρ–ΐΉΣΘ§ΒΪΨΏΧε–ΐΉΣΖΫœρ”…œΒΆ≥≥θ ΦΫ«Ε·ΝΩΨωΕ®ΓΘ

¥”’φ Β Β―ι ΐΨί―ßœΑ
Μυ”ΎΗκΉ”GPS ΐΨίΘ§…ώΨ≠Άχ¬γ≥…ΙΠ―ßœΑΝΥΖ«ΗςœρΆ§–‘ΫΜΜΞΚ· ΐΘ®Κ§ ”“ΑΫ«Ε»Βς÷ΤΚ· ΐhf(Π»ij)ΚΆhg(Π»ij)Θ©ΚΆ≥Ύ‘Ξ ±ΦδΘ®Π”0=7.83sΘ©ΓΘ―ΒΝΖΚσΒΡΡΘ–Ά≤ΜΫωΆξΟάΗ¥œ÷ΝΥ«Α20ΟκΒΡΝλΒΦ-ΗζΥφΙλΦΘΘ®Agent AΈΣΝλΒΦ’ΏΘ©Θ§ΜΙΡή‘Λ≤βΚσ–χ100ΟκΒΡΦ·»Κ‘ΥΕ·Θ§÷»–ρ≤Έ ΐ Φ÷’Έ§≥÷‘Ύ0.8“‘…œΘ§÷Λ ΒΝΥΡΘ–ΆΕ‘’φ Β…ζΈο––ΈΣΒΡΜΙ‘≠ΡήΝΠΓΘ

ά©’Ι”Π”ΟΘΚΝ§–χΉΣΜΜΓΔΒΰΦ”ΦΑ‘Φ χΜΖΨ≥œ¬ΒΡ”Ωœ÷
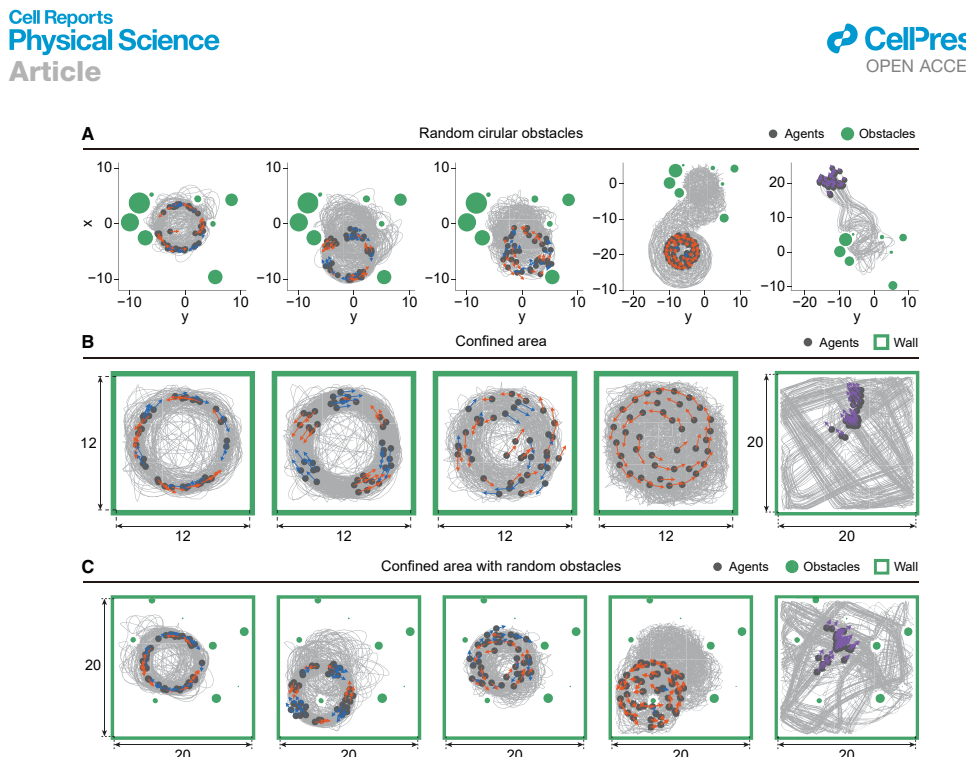
―–ΨΩ―ί ΨΝΥΆ§“Μ»Κ¥ζάμ‘ΎΕύ÷÷Φ·ΧεΡΘ ΫΦδΒΡΝ§–χΉΣΜΜΘ®ΥφΜζΧ§Γζ¥Ί»ΚΓζΜΖΉ¥ΓζΥΪΡΞΖΜΓζΦ·»ΚΓζΒΞΡΞΖΜΘ©Θ§Ά®Ιΐ÷Η ΐΥΞΦθΚ· ΐΤΫΜ§«–ΜΜΫΜΜΞΚ· ΐ≤Έ ΐΓΘΗϋ“ΐ»ΥΉΔΡΩΒΡ «Θ§Ά®ΙΐΈΣΖ«Ψυ‘»ΫΜΜΞ»ΚΧεΖ÷≈δ≤ΜΆ§ΫΜΜΞΡΘ–ΆΘ§ Βœ÷ΝΥΥΪΜΖΫαΙΙΓΔΜΖ-ΡΞΖΜΙ≤¥φΒ»ΜλΚœΡΘ ΫΘ§ΈΣ–≠Ά§»ΈΈώΘ®»γΡΩ±ξΜΛΈάΓΔΑϋΈß’λ≤λΘ©ΧαΙ©ΝΥ–¬ΥΦ¬ΖΓΘ‘Ύ’œΑ≠ΈοΚΆΟή±’ΜΖΨ≥≤β ‘÷–Θ§¥ζάμΡήΉ‘ΖΔ±ήΩΣ’œΑ≠ΜρΫΪΤδΡ…»κΦ·Χε‘ΥΕ·ΙλΦΘΘ§ΒΪΒ±Ω…”ΟΩ’Φδ–Γ”ΎΡΘ ΫΦΗΚΈ–η«σ ±Θ§”Ωœ÷––ΈΣΜα ήΒΫ“÷÷ΤΓΘ
ΗΟ―–ΨΩΆ®ΙΐΈοάμ–≈œΔ…ώΨ≠Άχ¬γ≥…ΙΠΤΤΫβΝΥΦ·Χε‘ΥΕ·ΩΊ÷ΤΒΡΡφœρΈ ΧβΘ§ Βœ÷ΝΥ¥”"άμΫβ”Ωœ÷"ΒΫ"≤ΌΩΊ”Ωœ÷"ΒΡΖΕ ΫΉΣ±δΓΘΥυΧα≥ωΒΡΩρΦή≤ΜΫωΡήΨΪΉΦΗ¥œ÷…ζΈοΦ·»ΚΒΡΕ·ΝΠ―ßΧΊ’ςΘ§ΜΙΈΣΜζΤς»ΥΦ·»Κ–≠Ά§ΓΔΜν–‘Έο÷ Ήι÷·Β»Νλ”ρΧαΙ©ΝΥΩ…ΦΤΥψΒΡ…ηΦΤΙΛΨΏΓΘΧΊ±π÷ΒΒΟΙΊΉΔΒΡ «Θ§ΗΟΡΘ–ΆΕ‘Ζ«Ψυ‘»ΫΜΜΞΓΔΜΖΨ≥‘Φ χΚΆ≥θ ΦΧθΦΰΒΡ¬≥Ατ–‘¥ΠάμΘ§’Ιœ÷ΝΥ«Ωœ÷ Β”Π”Ο«±ΝΠΓΘΈ¥ά¥ΙΛΉςΩ…ά©’Ι÷ΝΗϋ¥σΙφΡΘ’φ ΒΙλΦΘ ΐΨίΖ÷ΈωΘ§Ϋχ“Μ≤ΫΝΩΜ·Φ·»ΚœΒΆ≥ΒΡΦΪΜ·ΓΔΝΎΨ”Ψύάκ’«¬δΒ»Ά≥ΦΤΧΊ–‘Θ§Ήν÷’ΆΤΕ·Η¥‘”œΒΆ≥¥”―–ΨΩΕ‘œσœρΙΛ≥ΧΙΛΨΏΒΡΉΣΜ·ΓΘ
…ζΈοΆ®ΈΔ–≈ΙΪ÷ΎΚ≈
÷ΣΟϊΤσ“Β’–ΤΗ
Ϋώ»’Ε·Χ§ | »Υ≤≈ –≥Γ | –¬ΦΦ θΉ®άΗ | ÷–ΙζΩΤ―ß»Υ | ‘Τ’ΙΧ® | BioHot | ‘ΤΫ≤ΧΟ÷±≤Ξ | Μα’Ι÷––Ρ | ΧΊΦέΉ®άΗ | ΦΦ θΩλ―Ε | ΟβΖ― ‘”Ο
Αφ»®Υυ”– …ζΈοΆ®
Copyright© eBiotrade.com, All Rights Reserved
ΝΣœΒ–≈œδΘΚ
‘ΝICP±Η09063491Κ≈
