
-

…ζΈοΆ®ΙΌΈΔ
≈ψΡψΉΞΉΓ…ζΟϋΩΤΦΦ
ΧχΕ·ΒΡ¬ω≤Ϊ
…ζΈοΆ®ΙΌΈΔ
≈ψΡψΉΞΉΓ…ζΟϋΩΤΦΦ
ΧχΕ·ΒΡ¬ω≤Ϊ
Μυ”Ύ¬ΖΨΕ÷––ΡΜ·¬λ“œΤτΖΔΒΡ»ΪΨΑΦ«“δΡΘ–Ά Βœ÷άύ≥ΒΜζΤς»ΥΒΡΥΪœρ¬ΖΨΕΗζΥφ
ΓΨΉ÷ΧεΘΚ ¥σ ÷– –Γ ΓΩ ±ΦδΘΚ2025Ρξ09‘¬26»’ ά¥‘¥ΘΚNature Communications 15.7
±ύΦ≠ΆΤΦωΘΚ
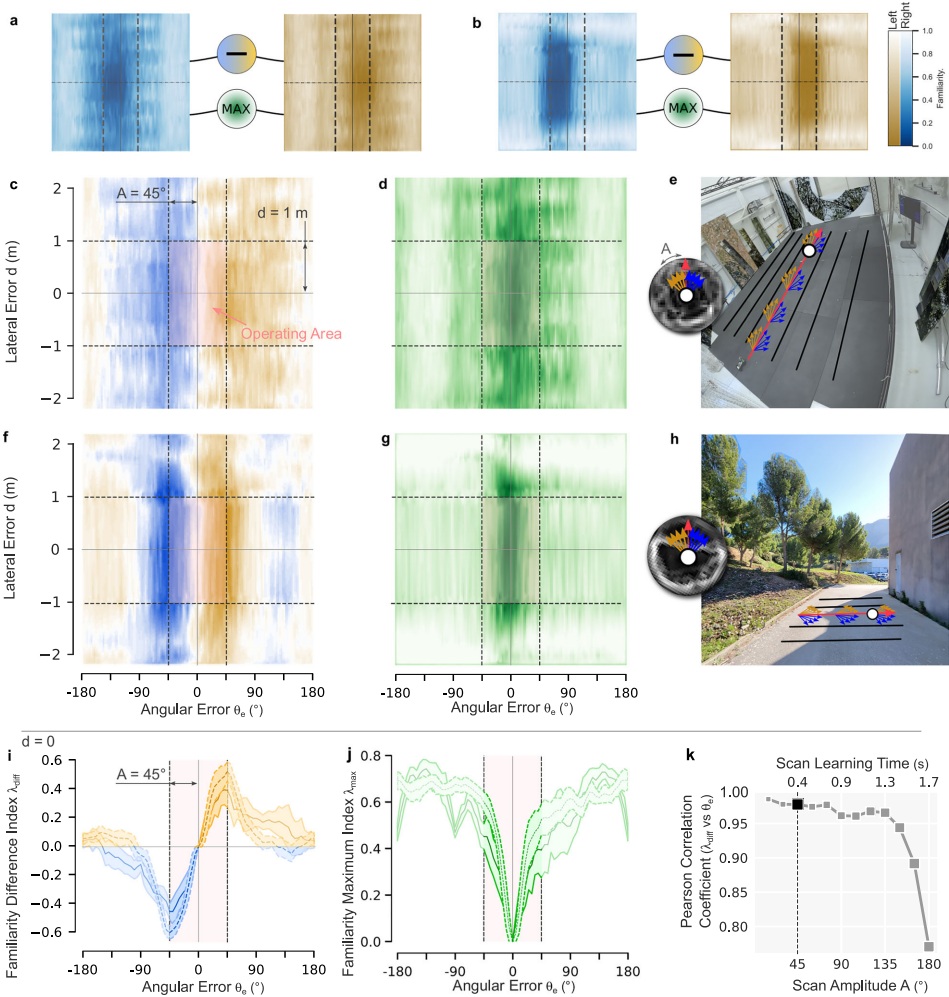
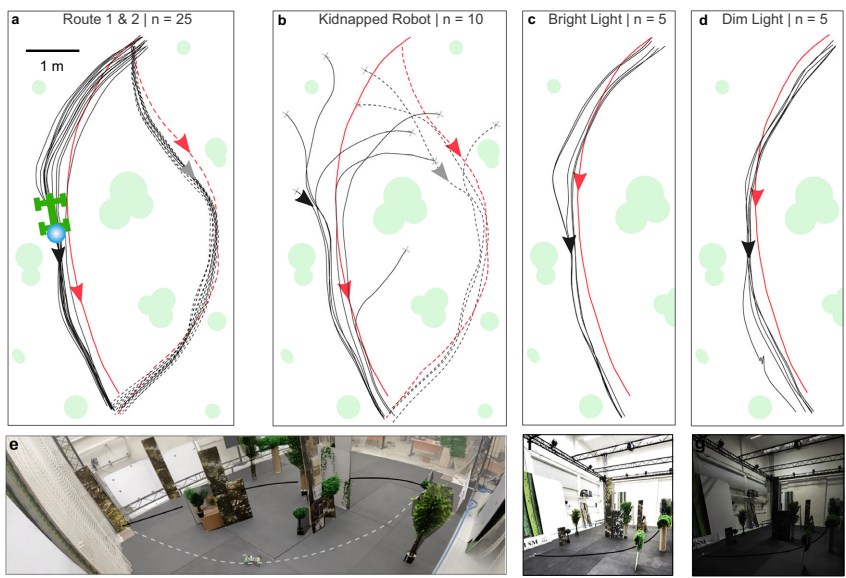
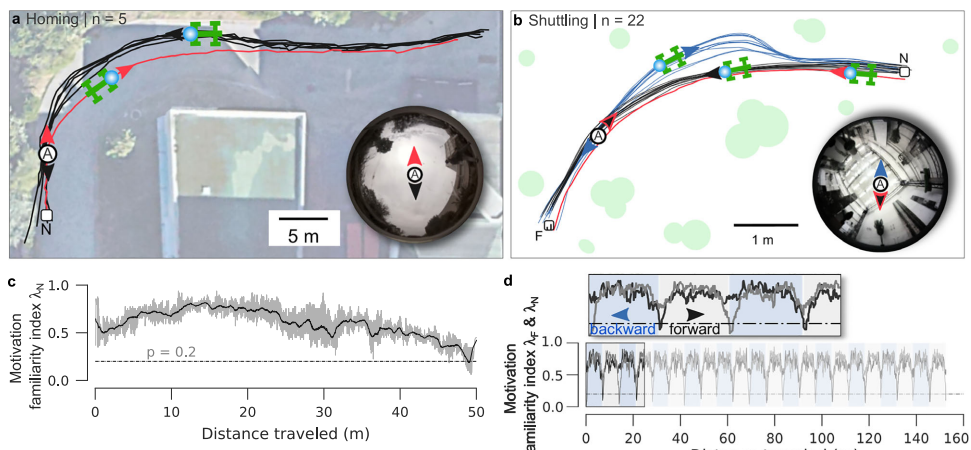
ΓΓΓΓ±Ψ―–ΨΩ’κΕ‘Ή‘÷ςΒΦΚΫΜζΤς»ΥΉ ‘¥ ήœόœ¬ΒΡ≥ΛΨύάκ¬ΖΨΕΗζΥφΡ―ΧβΘ§ ή¬λ“œΗΏ–ßΒΦΚΫΜζ÷ΤΤτΖΔΘ§Χα≥ωΝΥ“Μ÷÷Μυ”Ύ¬ΖΨΕ÷––ΡΜ·≤ύœρΦ«“δΒΡ»ΪΨΑ¬Ζ”…―ßœΑ”κΗζΥφ…ώΨ≠–ΈΧ§ΡΘ–ΆΓΘ―–ΨΩΆ≈Ε”‘ΎAntcarάύ≥ΒΜζΤς»Υ…œ Βœ÷ΝΥΥΪœρ¬ΖΨΕΒΦΚΫΓΔΕΥΒψ Ε±πΦΑ familiarity Ή‘ ”ΠΥΌΕ»ΩΊ÷ΤΘ§Ά®Ιΐάν―≈Τ’≈ΒΖρΈ»Ε®–‘Ζ÷Έω”κ¥σΙφΡΘ Β÷Λ≤β ‘Θ®113¥Έ ‘―ιΘ§Ήήάο≥Χ1.6 kmΘ©Θ§÷Λ ΒœΒΆ≥‘ΎΫω–η800œώΥΊ δ»κΓΔ300 MBΡΎ¥φΚΆ18.75 kB/50ΟΉ¬Ζ”…ΒΡΦΪΒΆΉ ‘¥œϊΚΡœ¬Θ§ Βœ÷÷–ΈΜΚαœρΈσ≤ν<25 cmΒΡ–‘ΡήΆΜΤΤΘ§ΈΣάΞ≥φ»œ÷Σ―–ΨΩ”κΉ ‘¥‘Φ χœ¬ΒΡΉ‘÷ςΜζΤς»ΥΦΦ θΧαΙ©ΝΥ÷Ί“Σάμ¬έ”κ ΒΦυ÷ß≥≈ΓΘ
 …ζΈοΆ®ΈΔ–≈ΙΪ÷ΎΚ≈
…ζΈοΆ®ΈΔ–≈ΙΪ÷ΎΚ≈
÷ΣΟϊΤσ“Β’–ΤΗ
Ϋώ»’Ε·Χ§ | »Υ≤≈ –≥Γ | –¬ΦΦ θΉ®άΗ | ÷–ΙζΩΤ―ß»Υ | ‘Τ’ΙΧ® | BioHot | ‘ΤΫ≤ΧΟ÷±≤Ξ | Μα’Ι÷––Ρ | ΧΊΦέΉ®άΗ | ΦΦ θΩλ―Ε | ΟβΖ― ‘”Ο
Αφ»®Υυ”– …ζΈοΆ®
Copyright© eBiotrade.com, All Rights Reserved
ΝΣœΒ–≈œδΘΚ
‘ΝICP±Η09063491Κ≈
